USB_Demo
mini现在支持使用TCP获取图像以及IMU数据,使用接口控制相机算法启停和接收算法位姿结果。
需要将mini设备的固件版本同步更新至20250317,如果版本早于0317则需要去官网下载最新的固件并按照版本更新的步骤更新固件。
1.下载SDK demo源码到自己的电脑
git clone https://github.com/Hessian-matrix/baton_mini_sdk_demo
2.选择编译方式
需要自行安装OpenCV环境。
1)ROS
如果是使用ROS的话可以直接把代码放到工作空间里面,然后使用ros_build.sh脚本编译代码,编译出来就是通过USB 的TCP接收到图像和IMU数据,通过接口函数控制设备算法和接收位姿数据,最后再通过话题重新把数据发出。话题名:
/baton_mini/imu、/baton_mini/odometry、/baton_mini/image_left、/baton_mini/image_right
2)非ROS
如果不使用ROS的话,可以用build_non_ros.sh脚本编译代码。运行代码可以在两个回调函数里面拿到IMU的数据结构体和两个cv::Mat灰色图像。
3.编译成功后测试代码
1)ROS
查看本机IP
ifconfig
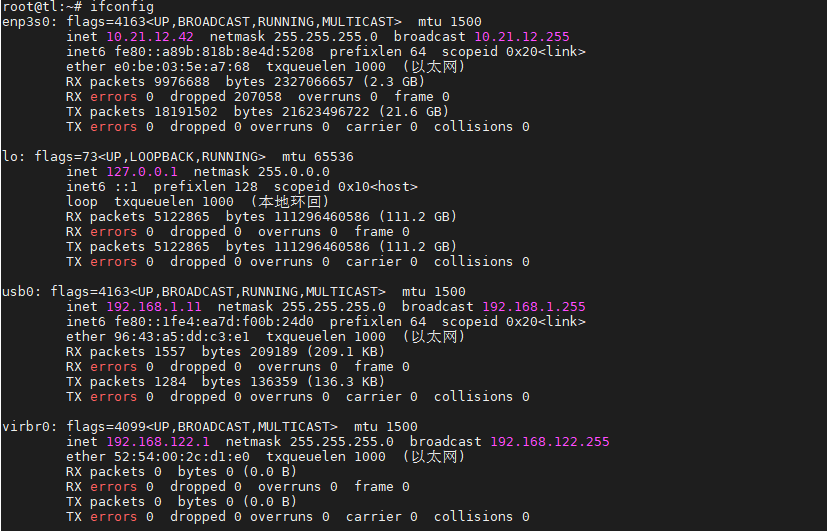
可以看到usb0给我电脑分配的ip地址为192.168.1.11
配置launch文件里面的相机对应的server_ip和本机ip。
<launch>
<node name="baton_mini" pkg="baton_mini" type="baton_mini" output="screen">
<param name="server_ip" value="192.168.1.10"/>
<param name="local_ip" value="192.168.1.11"/>
</node>
</launch>
使用roslaunch启动相机接收节点。
roslaunch baton_mini baton_mini.launch
2)非ROS
同样是查看本机分配的IP,ifconfig,结果假定和上面一样192.168.1.11
将ip填入baton_mini.cpp中的第24行,
std::string local_ip = "192.168.1.11";
重新运行build_non_ros.sh脚本编译。然后运行生成的执行文件baton_mini
3)效果
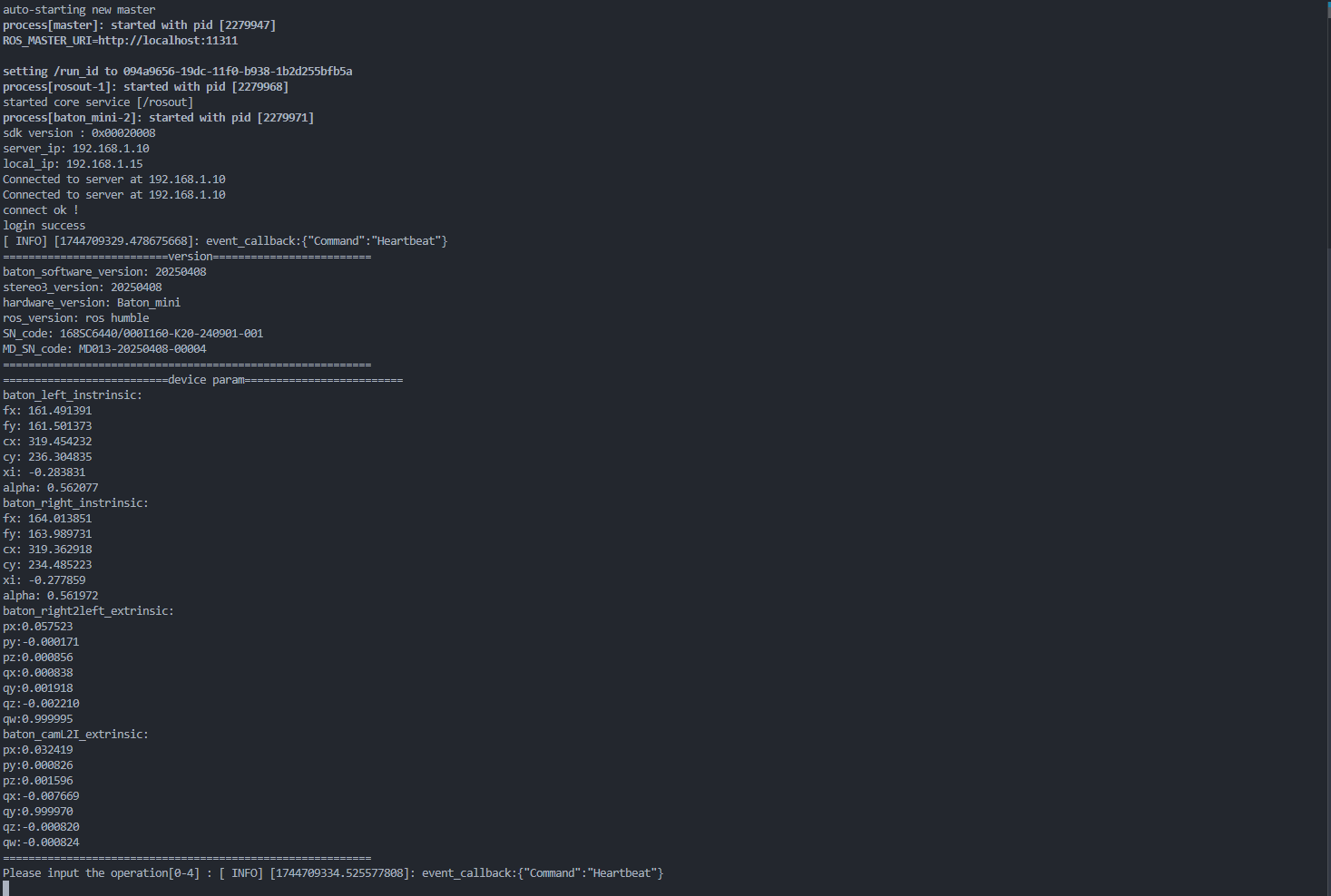
如果连接成功,终端会输出设备的version信息以及相机参数,并进入终端接收键盘命令线程:
void command_thread(){
vio_sdk_init();
HANDLE streamHandle1 = net_vio_stream_connect(loginHandle, 1, stream_callback);
get_device_version();
get_device_param();
// set_network("192.168.1.10");
cout << "Please input the operation[0-4] : ";
imu_switch imu_status = OFF;
int v;
while (cin >> v){
if (v == 0) {//logout connect
net_vio_logout(loginHandle);
break;
}
else if (v == 1){//start or stop
if (sys_status == ready) {//The system is currently in a ready state and can be started directly
alog_start();
}
else if (sys_status == stereo3_running) {//The system is currently in a running state and can be stoped
algo_stop();
}
}
else if (v == 2) {//algo restart
if (sys_status == stereo3_running) {//The stereo3 algorithm is currently in a running state and can be restart
algo_restart();
}
}
else if(v == 3){//open or close imu receive
if(imu_status == ON){
imu_status = OFF;
baton_open_imu_recv(imu_status);
}
else{
imu_status = ON;
baton_open_imu_recv(imu_status);
}
}
else if(v == 4){//Select to receive image data
baton_open_image_recv(stereo);
}
}
net_vio_sdk_exit();
cout << "ByeBye\n";
}
命令接收线程里面,键盘输入0-4:
0:退出登录
1:开启算法 或者停止算法
2:算法重置
3:开启IMU数据接收
4:开启图像数据接收
如果是ROS的话会直接把接收到的数据转成话题发送出来。
如果是非ROS的话数据接口在下面的四个函数里面,用户自己拿出来用即可。
void odom_data_print(int length, const char* frameData) {}
voidimu_data_recv(const imu_data& imu){}
voidimage_left_data(const cv::Mat& image_){}
voidimage_right_data(const cv::Mat& image_){}