常见问题
Viobot2网络配置之dhcp
其实并不推荐使用dhcp,因为如果是把设备安装在固定场景中组网的话,我们还是希望这个设备它本身的ip能够固定下来,这样至少省去了查找设备ip的麻烦。
但如果使用场景特殊,确实需要dhcp来给设备分配ip的话,也是可以的。
ssh登录设备后
sudo cp /etc/netplan/01-netcfg.yaml /etc/netplan/01-netcfg.yaml.backup#备份文件
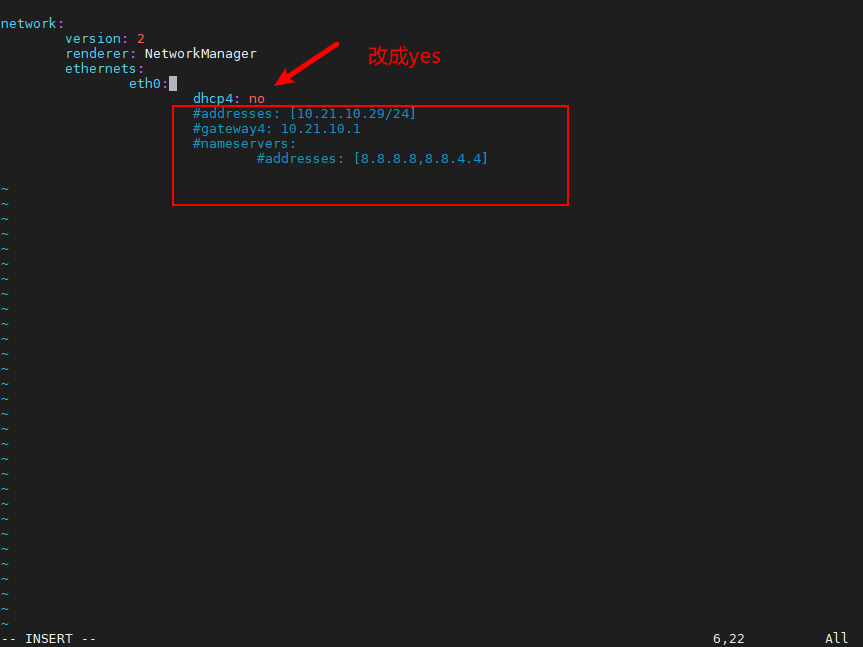
sudo vim /etc/netplan/01-netcfg.yaml
把dhcp4改成yes,下面几行全部注释掉,注意缩进,然后保存退出。
Viobot和其他主控做时间同步
网络时间同步可以使用NTP服务,配置一台作为NTP服务器,另一台作为客户端与之同步。
RTK时间同步
Viobot2如果是有GNSS模块的版本接入天线后再使用RTK就是已经做了时间同步,RTK与GNSS同时接入天线使用,如果只需要RTK模块,则需要将RTK的PPS信号与Viobot2的主板连接。
系统时间异常
需要网络时间同步可以使用systemd-timesyncd,默认有网络时Viobot2会自动同步网络时间;
如果发现接入RTK和GNSS时系统时间来回跳变,可以尝试关闭设备的网络时间同步
sudo systemctl stop systemd-timesyncd,只使用GPS时间。
不方便通过UI操作
Viobot2最快捷的使用方式是通过UI上操作的,目前基础的视觉里程计功能可以通过HTTP协议的SDK来操作,也兼容通过ros的通讯方式进行控制,HM inside的建图部分功能还需要配合UI进行使用。
重定位建图时一点击进度条就100%
这种情况大部分是建图的目录异常,路径不存在或者是路径下没有用于建图的数据,需要详细检查建图的路径与保存bow时的路径一致,如果检查了路径正确且算法保存的bow文件也无异常的情况可以尝试更新最新的固件再做尝试。
重定位触发怎么判断是否成功
重定位触发之后会发布/baton/stereo3/odom_relo话题,详细请看HM建图与重定位的判断重定位是否触发部分。