Viobot2-Lite
硬件总览
硬件配置
双目鱼眼相机:164.7° 640x480
imu: 200hz 硬件同步触发相机取图
算力平台:RK3588 4+32G
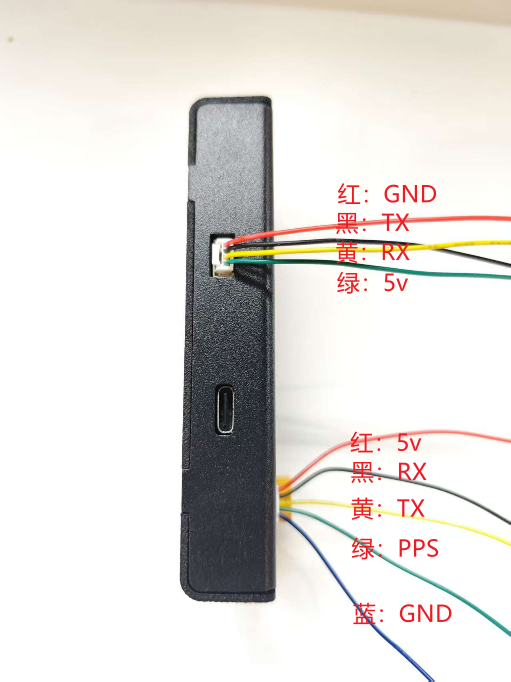
viobot2 lite的外设总览如下:
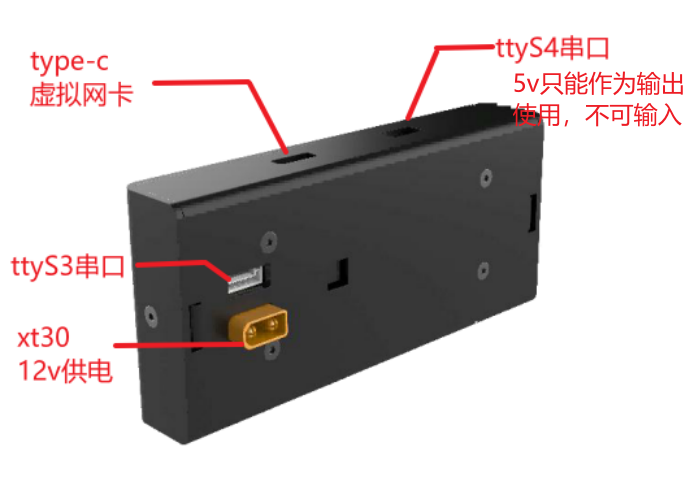
需要注意:
ttyS4目前硬件有已知的硬件缺陷: ttyS4的串口不可接入外部5v电源,只可作为输出,建议只接入GND、TX、RX三根线,如果外部有5V输入的情况下一定会导致硬件电路损坏。
ttyS3的5v输出具有200毫安限流,无法驱动大功率设备
type-c接口无法为Lite进行供电,供电需要接xt30,注意正负极
开机使用
现在Lite和Viobot2一样都可以支持ros1、ros2的,但是不同ros版本的ip是不一样的。
| ros版本 | ip | 登录用户 | 登录密码 |
|---|---|---|---|
| ros1 | 192.168.1.10 | PRR | PRR |
| ros2 | 192.168.100.10 | PRR | PRR |
windows连接上位机使用(ros2为例)
正确按照xt30母口上标注的正负极接好12v电源,通电之后可从ttyS4的接口上亮起红灯;
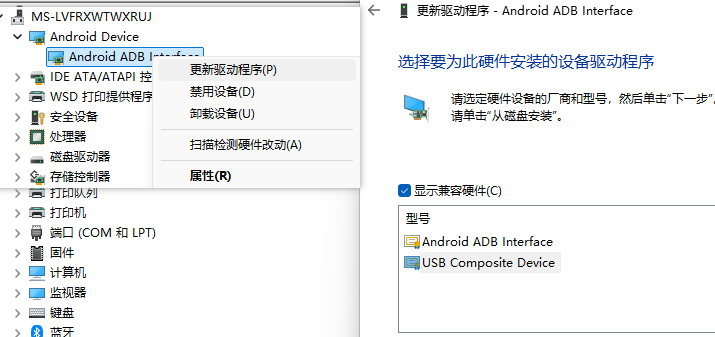
type-c数据线连接到windows电脑上,可能在windows上的网络连接上找不到虚拟网卡,需要进入到设备管理器中有一个
Android ADB的设备需要更改驱动程序,更改驱动程序之后在网络连接这里即出现了一个Remote NDIS based Internet Sharing Device的网卡设备,lite设备的固定ip是192.168.100.10,所以在设置本机的ip是只要和lite的ip不同即可,这里设置成192.168.100.12,按照以下步骤设置好固定ip即可。
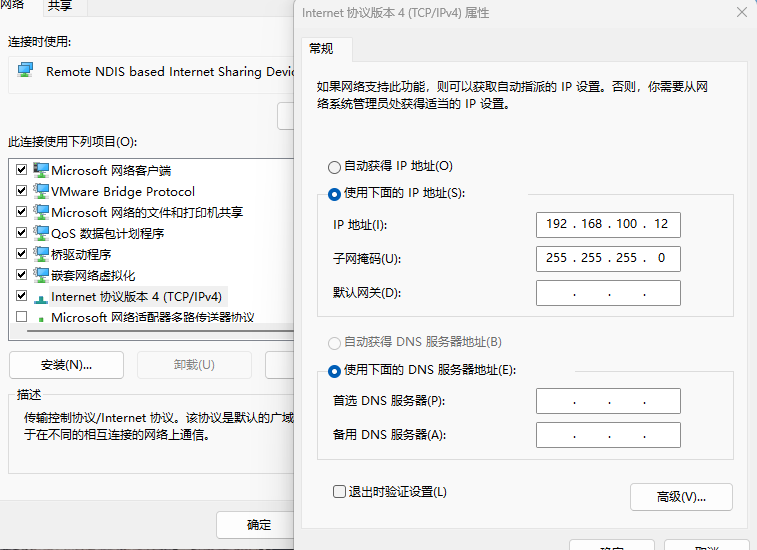
设置完ip之后,电脑端能ping通lite的ip地址,之后可使用上位机连接
使用上位机的使用方式和使用viobot2的方式一样。
Linux多机通讯使用(ros2为例)
ros1请参考Viobot2的主从机通讯
这里演示以ubuntu20为例
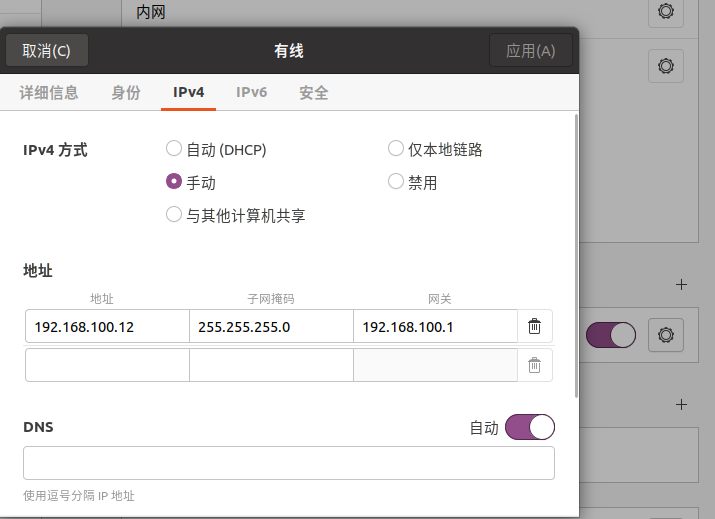
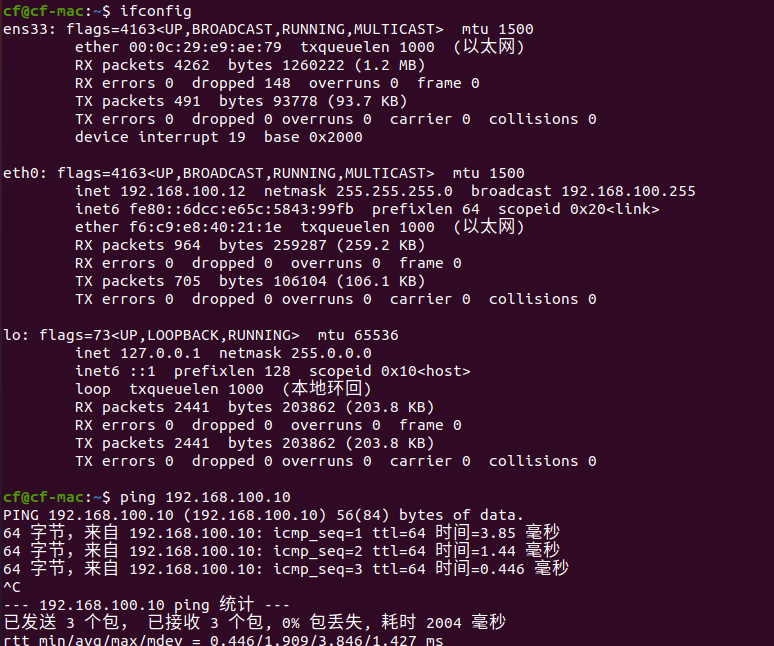
首先连接了ubuntu20之后首先需要配置固定ip,具体配置方式可自行搜索,目的是Ubuntu20和Lite之间的网络是互通的,以下是手动设置ip,并确保可以ping通
Lite启动之后ros2的
ROS_DOMAIN_ID默认为0,所以默认在按照好ros2的ubuntu20的系统中就可以看到Lite中的话题列表了。
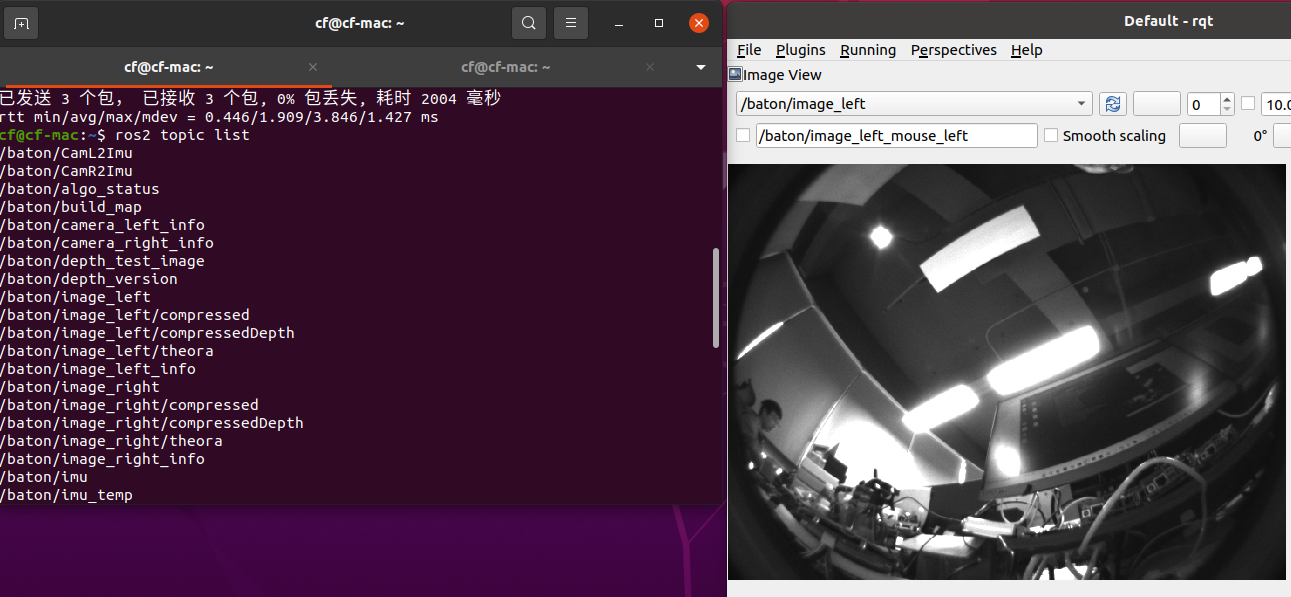
之后的一些使用上就和ros2的使用方式一致了,需要注意的是lite的usb虚拟网卡无法连接网络,我们在lite里面已经内置了常用的一些ros2软件包,算法的输出可通过usb接收Lite发布的话题形式,也可以自由开发一套通过串口输出位姿的程序。
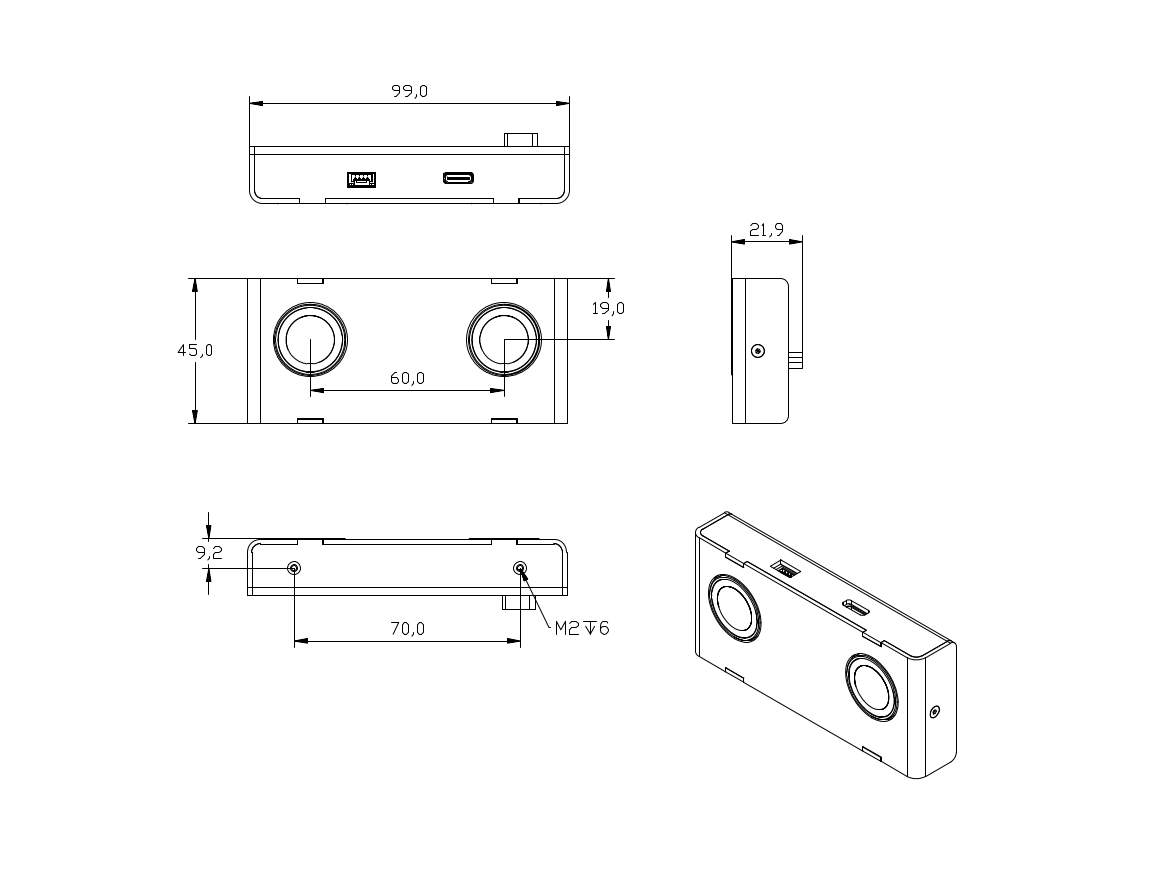
三维尺寸