I2C通信
下面我们来介绍Viobot2的I2C接口的使用
1.接口定义
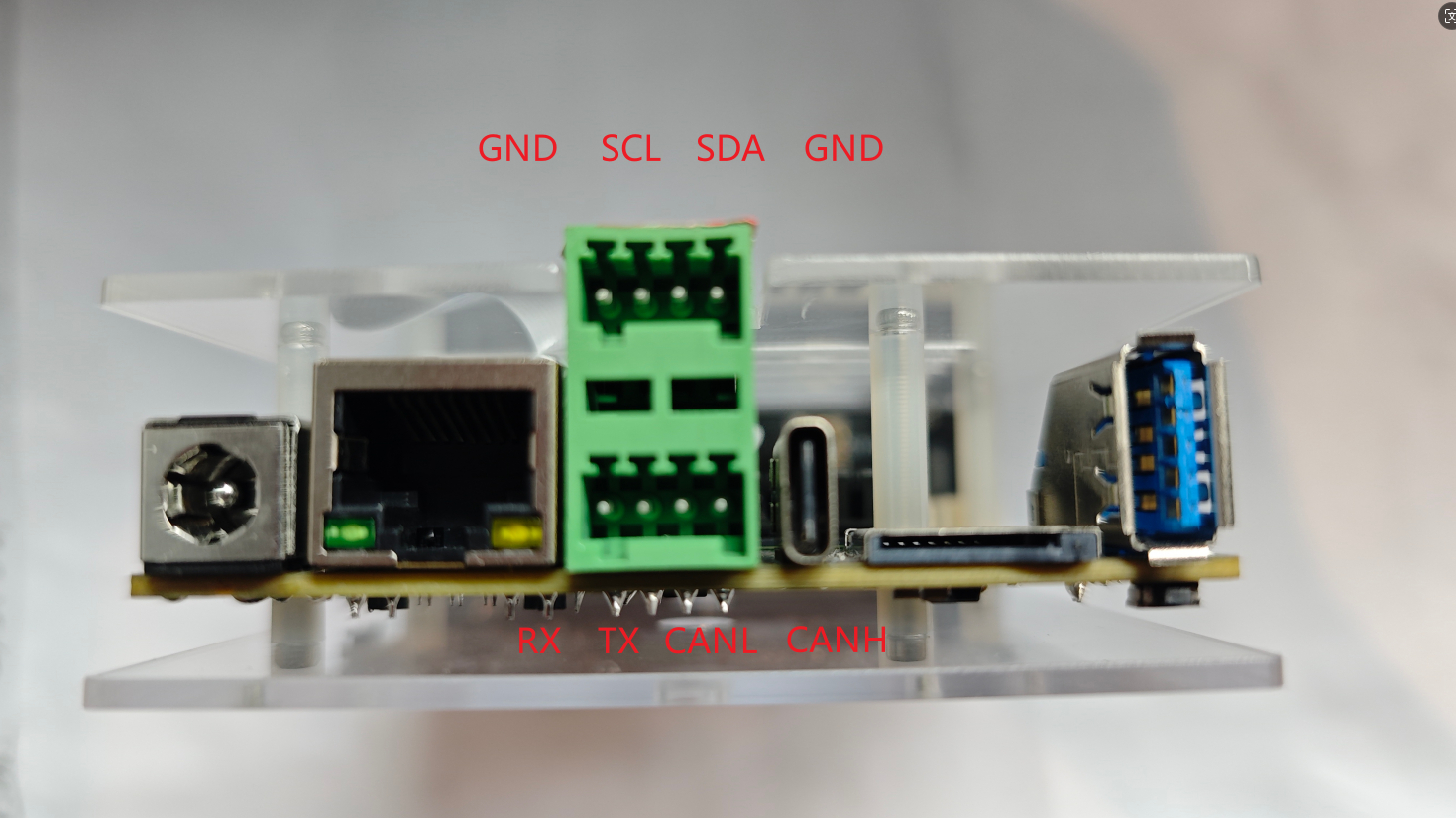
Viobot2面有一个2*4pin的接口母座,接头我们发货的时候会放在盒子里面的。
我们可以看到第一排从左到右引脚分别是GND SCL SDA GND
第二排从左到右分别是RX TX CANL CANH
对应的设备号:IIC6
2.硬件连接
我们以MPU9250的模块来做例子,由此也可以推到其他的iic设备。
给模块供电后直接把Baton和MPU9250的SCL、SDA分别对接起来。
3.程序编译测试
linux有自带的linux-I2C可以直接读写iic设备。
因为使用的是mpu9250,所以程序里面的寄存器都是针对9250的。
程序由三个文件组成,其实主要就是<linux/i2c.h>和<linux/i2c-dev.h>里面的write函数和read函数的简单使用。
(1)mpu9250.h
里面定义了mpu9250的一些寄存器地址,以及声明了mpu9250的类:
#ifndef _MPU9250_H
#define _MPU9250_H
/*C*/
#include <stdio.h>
#include <errno.h>
#include <stdlib.h>
/*C++*/
#include <cstdio>
#include <cstdlib>
#include <sstream>
#include <cstring>
#include <iostream>
#include <stdexcept>
/*other*/
#include <fcntl.h>
#include <unistd.h>
#include <termios.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <sys/types.h>
/*I2C*/
#include <linux/i2c.h>
#include <linux/i2c-dev.h>
#define I2C_DEV "/dev/i2c-6"
#define Device_Address 0x68
// #define Device_Address 0x69
//MPU6500的内部寄存器
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
//定义数字低通滤波器阈值
#define MPU9250_DLPF_BW_256 0x00
#define MPU9250_DLPF_BW_188 0x01
#define MPU9250_DLPF_BW_98 0x02
#define MPU9250_DLPF_BW_42 0x03
#define MPU9250_DLPF_BW_20 0x04
#define MPU9250_DLPF_BW_10 0x05
#define MPU9250_DLPF_BW_5 0x06
#define gravity 9.8
class MPU9250{
public:
MPU9250();
~MPU9250();
void Init();
void getAccelGyroData(int16_t *AccelGyroData);
void MPU9250_Temp_Read(int16_t *TempData);
// void MPU9250_Set_ZeroBias();
private:
int fd;
};
#endif
(2)mpu9250.cpp
mpu9250的类实现,包含了初始化mpu9250、读取加速度和角速度原始数据,以及读取温度数据几个方法:
#include "MPU9250_demo/mpu9250.h"
// #include "mpu9250.h"
MPU9250::MPU9250(){
fd = open(I2C_DEV,O_RDWR);
if(fd < 0){
// printf("open %s failed\n",I2C_DEV);
std::stringstream ss;
ss << "Failed to open " << I2C_DEV << " device";
throw std::runtime_error(ss.str());
}
int ret = ioctl(fd,I2C_SLAVE,Device_Address);
if(ret < 0){
// printf("setenv address faile ret: %x \n", ret);
throw std::runtime_error("Failed to set I2C address");
}
}
MPU9250::~MPU9250(){
close(fd);
}
void MPU9250::Init(){
char buf[2];
//复位MPU9250
buf[0] = MPU_PWR_MGMT1_REG;
buf[1] = 0x80;
write(fd,buf,2);
//唤醒MPU9250,并选择陀螺仪x轴PLL为时钟源 (MPU9250_RA_PWR_MGMT_1, 0x01)
usleep(100 * 1000);
buf[0] = MPU_PWR_MGMT1_REG;
buf[1] = 0x00;
write(fd,buf,2);
//禁止中断
usleep(100 * 1000);
buf[0] = MPU_INT_EN_REG;
buf[1] = 0x18;
write(fd, buf, 2);
//陀螺仪满量程+-250度/秒 (最低分辨率 = 2^15/250 = 131.072LSB/度/秒
usleep(100 * 1000);
buf[0] = MPU_GYRO_CFG_REG;
buf[1] = 0x00;
write(fd, buf, 2);
//加速度满量程+-4g (最低分辨率 = 2^15/4g = 8192/g )
usleep(100 * 1000);
buf[0] = MPU_ACCEL_CFG_REG;
buf[1] = 0x08;
write(fd, buf, 2);
//设置陀螺的输出为1kHZ,DLPF=20Hz
usleep(100 * 1000);
buf[0] = MPU_CFG_REG;
buf[1] = MPU9250_DLPF_BW_20;
write(fd, buf, 2);
//采样分频 (采样频率 = 陀螺仪输出频率 / (1+DIV),采样频率1000hz)
usleep(100 * 1000);
buf[0] = MPU_SAMPLE_RATE_REG;
buf[1] = 0x00;
write(fd, buf, 2);
// MPU 可直接访问MPU9250辅助I2C
usleep(100 * 1000);
buf[0] = MPU_INTBP_CFG_REG;
buf[1] = 0x82;
write(fd, buf, 2);
}
/*--------------TEST-------------*/
// addr[0] = MPU_DEVICE_ID_REG;
// write(fd,addr,1);
// read(fd,buf,1);
// printf("%x\r\n",buf[0]);
void MPU9250::getAccelGyroData(int16_t *AccelGyroData){
char addr[1];
char buf[6];
addr[0] = MPU_ACCEL_XOUTH_REG;
write(fd,addr,1);
read(fd,buf,6);
AccelGyroData[0] = (int16_t)((buf[0]<<8)|buf[1]);
AccelGyroData[1] = (int16_t)((buf[2]<<8)|buf[3]);
AccelGyroData[2] = (int16_t)((buf[4]<<8)|buf[5]);
addr[0] = MPU_GYRO_XOUTH_REG;
write(fd,addr,1);
read(fd,buf,6);
AccelGyroData[3] = (int16_t)((buf[0]<<8)|buf[1]);
AccelGyroData[4] = (int16_t)((buf[2]<<8)|buf[3]);
AccelGyroData[5] = (int16_t)((buf[4]<<8)|buf[5]);
}
void MPU9250::MPU9250_Temp_Read(int16_t *TempData){
char addr[1];
char buf[6];
short data;
addr[0] = MPU_TEMP_OUTH_REG;
write(fd,addr,1);
read(fd,buf,6);
data = (int16_t)((buf[0] << 8) | buf[1]);
*TempData = 21.0 + ((float)data / 333.87f);
}
(3)mpu9250_node.cpp
这里加了imu数据转化和话题发送,如果是ROS2可自行把话题发送改成ROS的,不使用ROS直接打印也可以。
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
#include <serial/serial.h>
#include <std_msgs/String.h>
#include <iostream>
#include <string>
#include <sstream>
#include "MPU9250_demo/mpu9250.h"
int main(int argc,char **argv){
int16_t accelgyrodata[6] = {0};
MPU9250 mpu9250;
ros::init(argc,argv,"MPU9250_demo");
ros::NodeHandle nh;
mpu9250.Init();//1khz输出频率
ros::Publisher imu_pub = nh.advertise<sensor_msgs::Imu>("imu",10);
sensor_msgs::Imu imu_msg;
ros::Rate loop_rate(1000);
while(ros::ok()){
mpu9250.getAccelGyroData(accelgyrodata);
imu_msg.header.stamp = ros::Time::now();
imu_msg.header.frame_id = "Imu_frame";
imu_msg.angular_velocity.x = accelgyrodata[3] / 131.072;
imu_msg.angular_velocity.y = accelgyrodata[4] / 131.072;
imu_msg.angular_velocity.z = accelgyrodata[5] / 131.072;
imu_msg.linear_acceleration.x = accelgyrodata[0] / 8192.0 * gravity;
imu_msg.linear_acceleration.y = accelgyrodata[1] / 8192.0 * gravity;
imu_msg.linear_acceleration.z = accelgyrodata[2] / 8192.0 * gravity;
printf("imu_msg.linear_acceleration.x = %lf\n",imu_msg.linear_acceleration.x);
printf("imu_msg.linear_acceleration.y = %lf\n",imu_msg.linear_acceleration.y);
printf("imu_msg.linear_acceleration.z = %lf\n",imu_msg.linear_acceleration.z);
printf("imu_msg.angular_velocity.x = %lf\n",imu_msg.angular_velocity.x);
printf("imu_msg.angular_velocity.y = %lf\n",imu_msg.angular_velocity.y);
printf("imu_msg.angular_velocity.z = %lf\n",imu_msg.angular_velocity.z);
imu_pub.publish(imu_msg);
loop_rate.sleep();
}
}
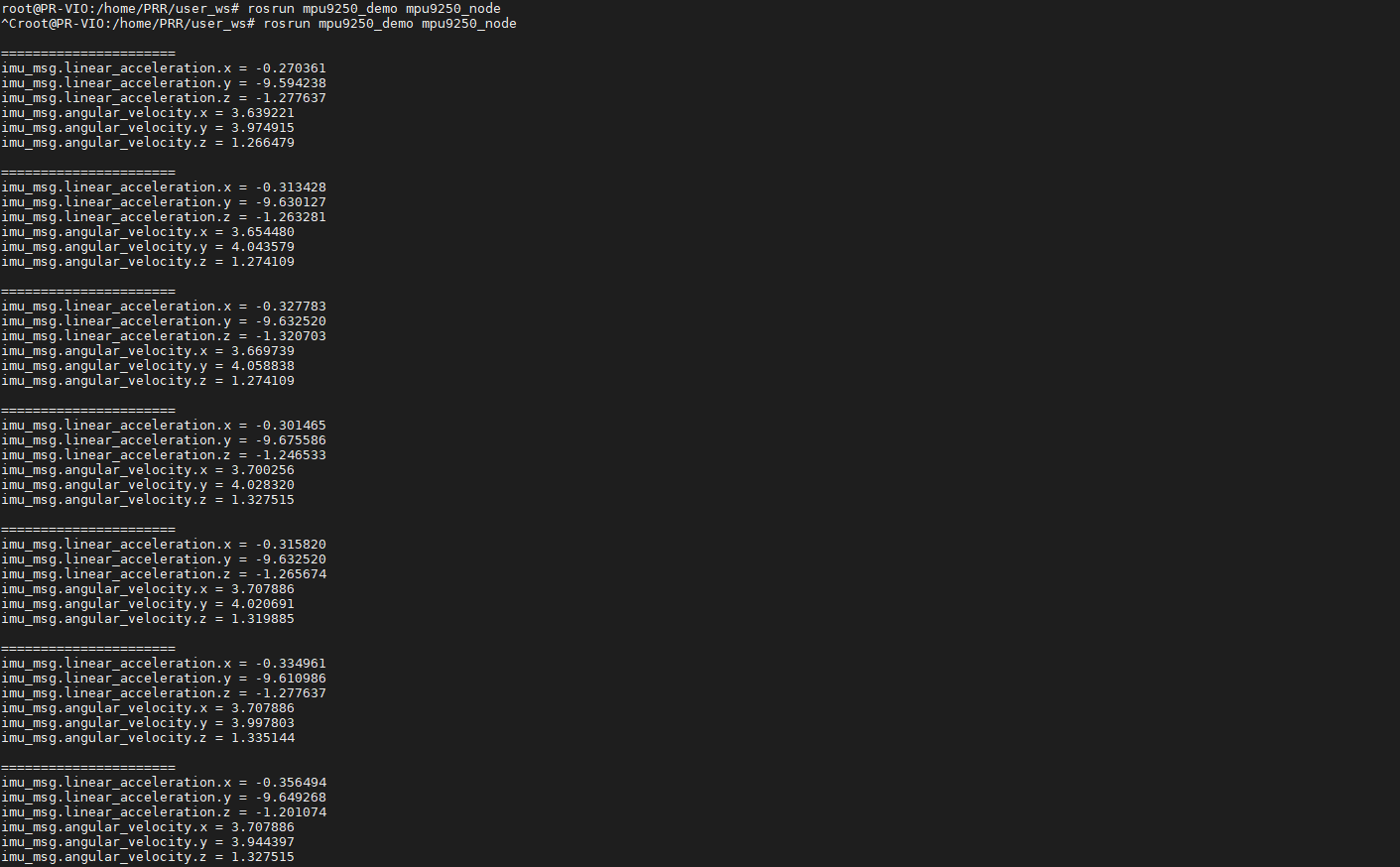
(4)效果展示
这个代码效果就是不断的读取mpu9250的数据并打印到终端