视觉融合RTK
Viobot2默认标配GNSS模块, 算法默认为GVIO,在没有接入GNSS数据时会退化为VIO模式。支持外部接入RTK模块,RTK数据接入时,GNSS数据会自动摒弃掉,算法融合RTK数据输出更精准位置结果。 viobot2使用RTK模块的大致步骤如下:
一.硬件准备
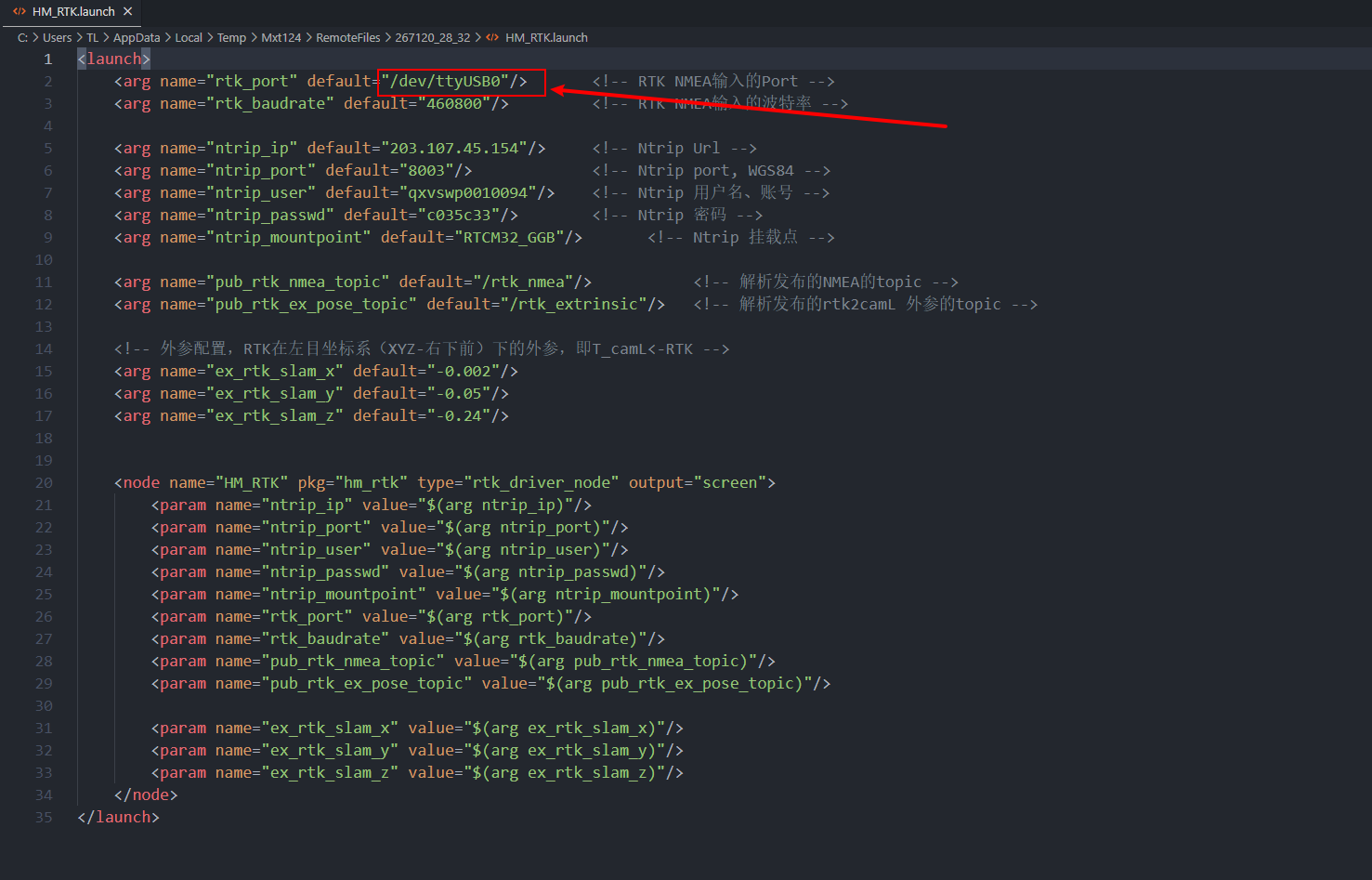
定制版viobot2带RTK的版本已经在硬件上接入了移远的LG290P模组,并且已经用将RTK模块的串口接入到Viobot2上的/dev/ttyS0串口上,RTK的驱动也已经预装好了,需要到对应的hm_rtk.launch中填入cors账号信息即可启动RTK,一般就在/root目录下的HM_RTK目录下,同步的是Hessian-matrix/HM_RTK_driver的驱动。到手按ros版本运行对应的指令即可启动RTK驱动,stereo3算法默认也配置了融合RTK:
#ros1
source ~/HM_RTK/devel/setup.bash
roslaunch hm_rtk hm_rtk.launch
#ros2:
source ~/HM_RTK/devel/setup.bash
ros2 launch hm_rtk_ros2.launch.py
Viobot2不配备RTK模块,需要用到的用户可以自行去选购RTK模块。RTK要求:能输出10Hz+ 的NMEA-0183协议标准的NMEA(GGA)固定解结果以及RMC字串(提供UTC时间、日期信息),一般的RTK模块都能输出这两种语句。
使用外部的GGA字符串通过ros话题/rtk_nmea发布给viobot2订阅使用(前提:viobot2配置RTK模式:UI上->设置->gnss栏->勾选RTK)。
所以数据流的简图如下:
![]()
二.模块驱动
黑森开源了一个RTK驱动仓库,可以直接使用:Hessian-matrix/HM_RTK_driver
其中依赖ceres_solver库,需要自己下载一下,可以使用我们gitee上面打包好的压缩包,直接编译安装。
git clone https://gitee.com/hessian_matrix/ceres_slver-2.1.0.git
cd ceres_slver-2.1.0
unzip ceres-solver-2.1.0.zip
cd ceres_solver-2.1.0
mkdir build && cd build
cmake ..
sudo make install -j4
编译驱动
mkdir -p HM_RTK_Driver_ws/src
cd HM_RTK_Driver_ws/src
git clone https://github.com/Hessian-matrix/HM_RTK_driver
cd HM_RTK_driver
git submodule init
git submodule update
cd ../../
catkin_make
2.1 硬件连接
RTK模块通过串口连接到Viobot2,如果是接的是USB转串口,需要自己去查一下接进来的串口号ls /dev/ttyUSB*

如果是接到后面的串口接口,串口号为ttyS0

然后将对应的串口号写到hm_rtk.launch文件里面
关于硬件PPS:我们用户版本都是带GNSS板的,上面天线接收了卫星时间,可以进行PPS时间同步。
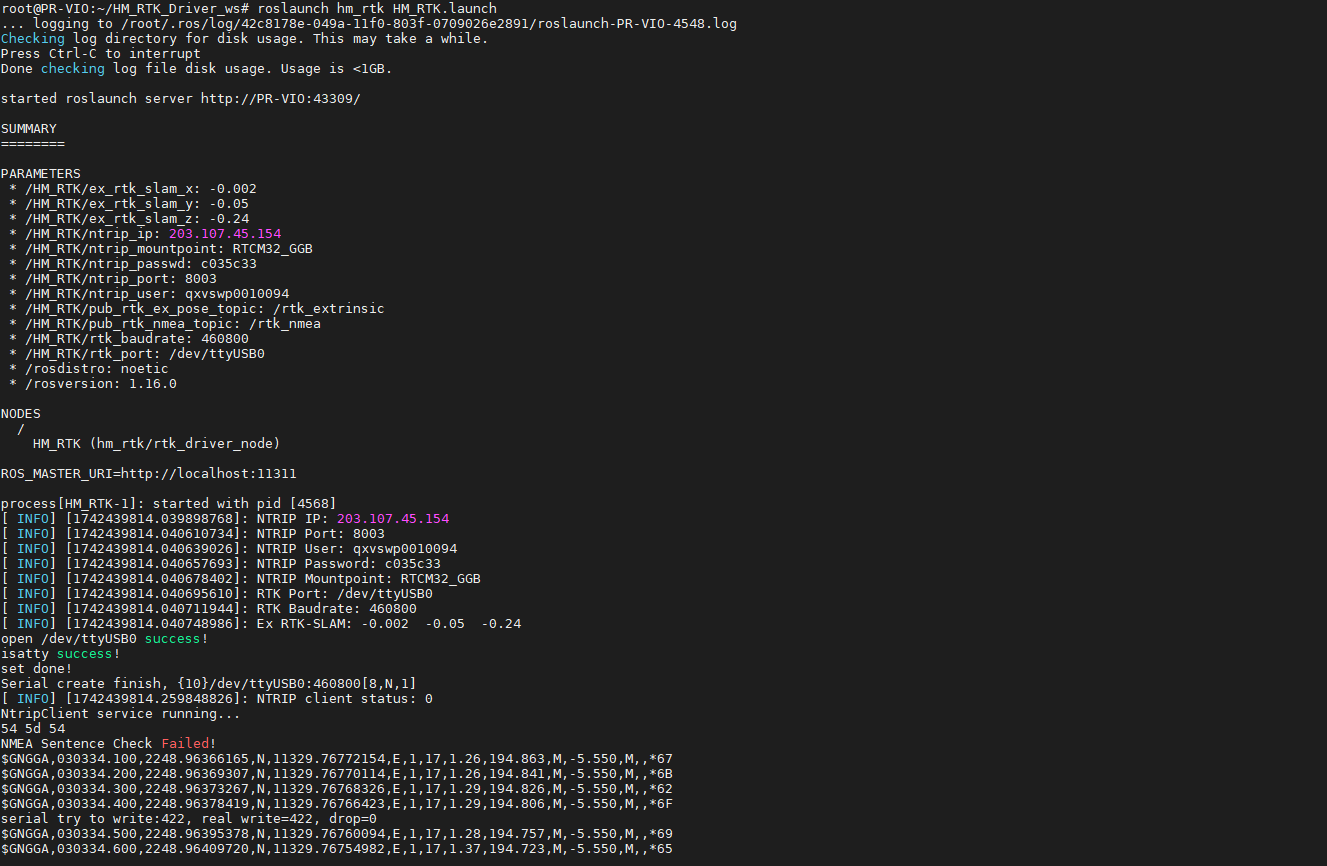
2.2 测试驱动
cd HM_RTK_Driver_ws
source ./devel/setup.bash
roslaunch hm_rtk hm_rtk.launch
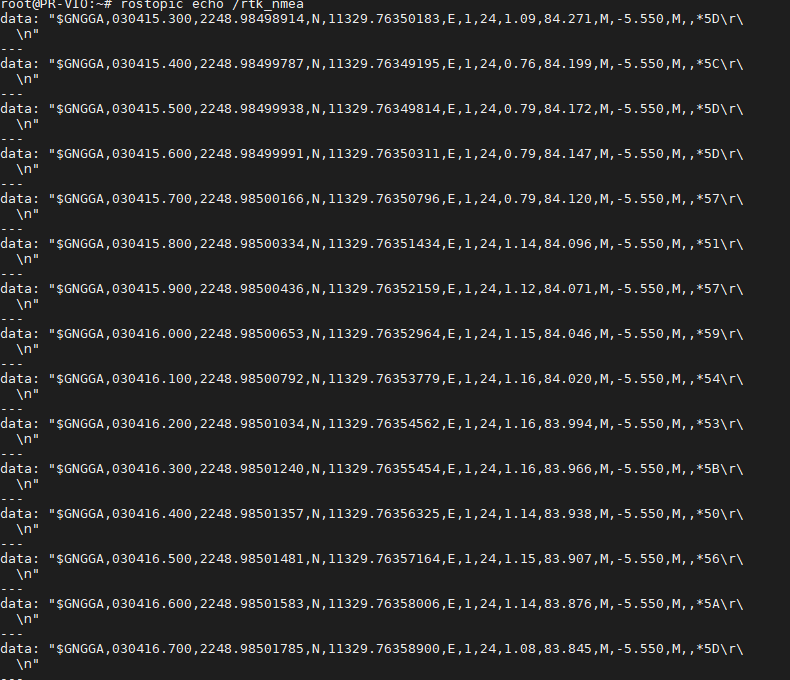
正常启动并且通过rostopic echo 查看到/rtk_nmea消息正常即可。
rostopic echo /rtk_nmea
三.模块数据接入和外参标定
3.1 确认设备当前软件版本
RTK功能需要上位机更新到20250314机之后的版本,同步更新设备software版本至20250318及之后的版本。设备使用前最好先到官网同步最新的固件,新版本会修复已知问题。官网地址:https://www.hessian-matrix.com
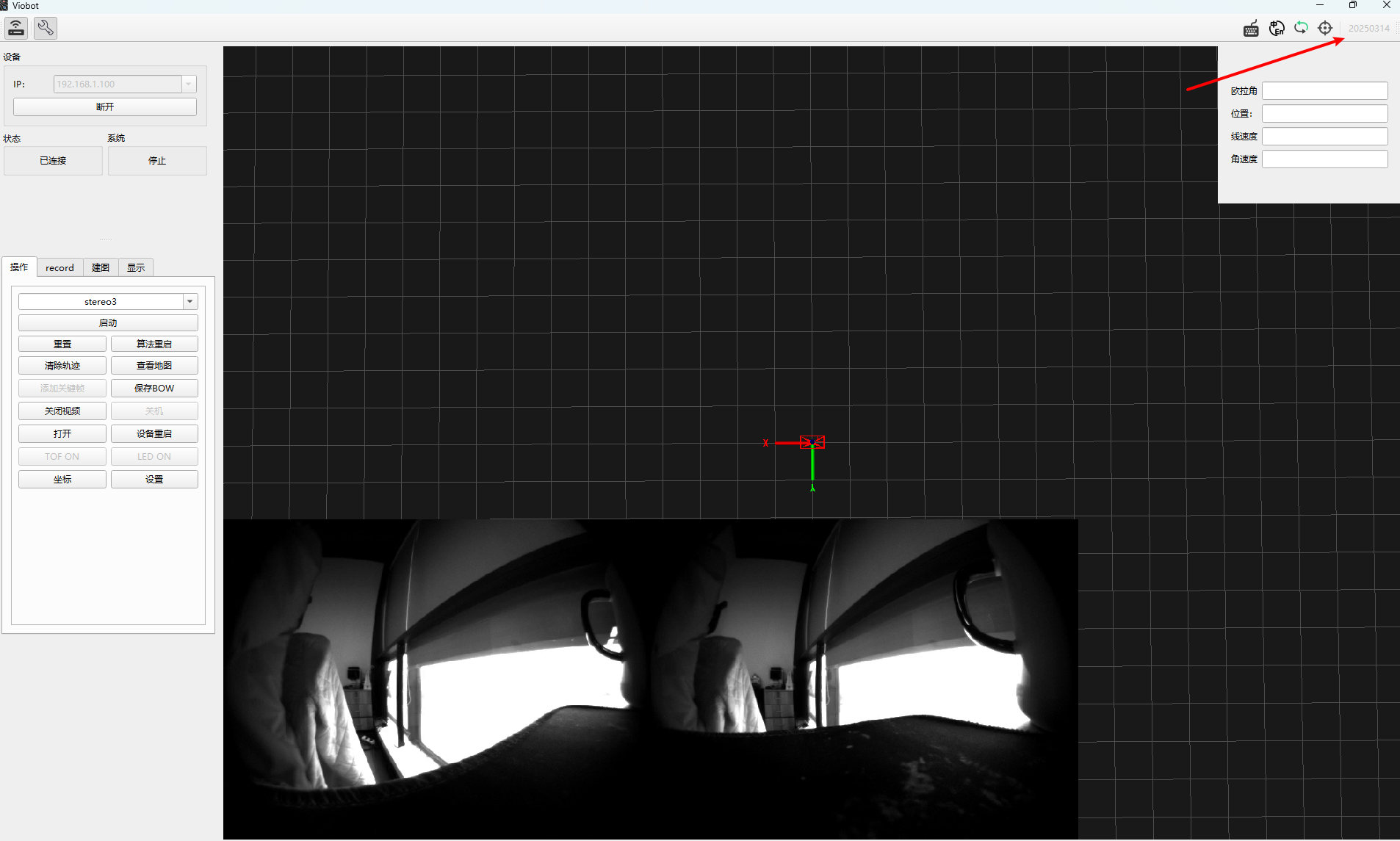
3.2 Viobot2开启RTK启用接口
在上位机连接Viobot2后点击设置,弹出的页面选到gnss页面,其中的两个勾选GNSS和RTK是单选的,勾选RTK后,会取消勾选GNSS,点击确定。
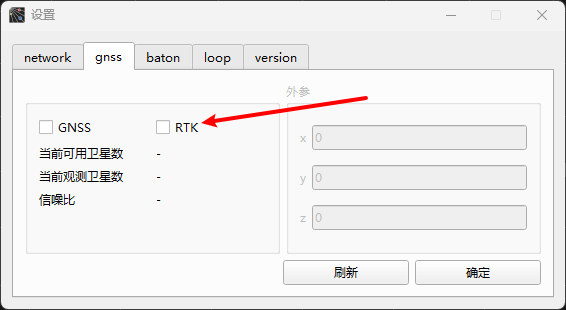
关闭设置页面,然后点击设备重启按键,重启Viobot2。
3.3 开启RTK驱动程序并把数据接入Viobot2
编译好RTK驱动并且确认好模块的连接之后,启动RTK驱动
roslaunch hm_rtk hm_rtk.launch
RTK驱动会把RTK的数据发送到Viobot2的程序里去解析出来,rostopic echo 可以看到/baton/rtk消息正常即可。
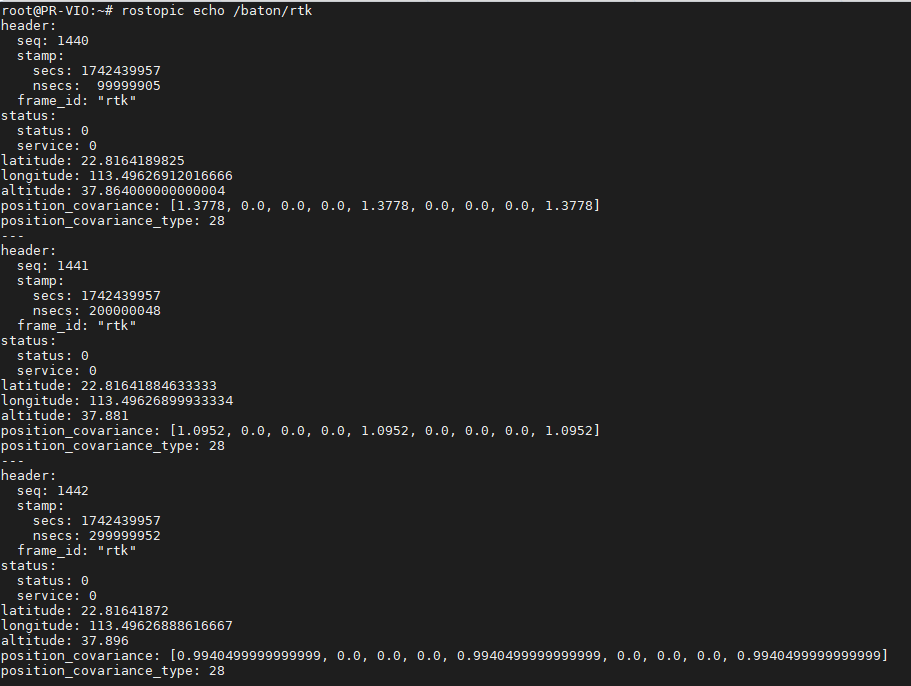
3.4 确认RTK当前是固定解
rostopic echo /baton/rtk
如果打印出来的status = 2,RTK当前有固定解。
3.5 标定RTK与左目外参
上面几步确认数据正常后,打开hm_rtk.launch,设置好Y轴的初始设定值
重新开RTK驱动
roslaunch hm_rtk hm_rtk.launch
启动stereo3算法,并且开启RTK驱动里面的标定程序
roslaunch hm_rtk calib_rtk_slam.launch
确认stereo3正常启动,标定程序正常启动后,移动Viobot2和RTK天线的组合体,随机多方向快速运动,避免静止或直线运动,推荐绕8运动,算法会截取最新的10s数据进行标定。标定完成后,ctrl+C结束程序,标定的结果会输出在终端上。

四.RTK融合
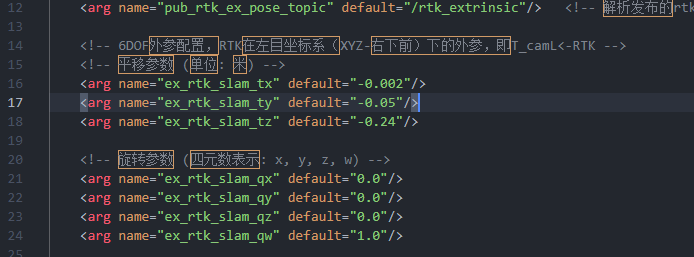
把标定结果重新写到HM_RTK.launch。
<arg name="ex_rtk_slam_x" default="-0.026357"/>
<arg name="ex_rtk_slam_y" default="-0.05"/>
<arg name="ex_rtk_slam_z" default="-0.283098"/>
然后重新把RTK驱动开起来,开启stereo3算法,运动过后等到RTK有固定解后,就会有RTK的融合结果了。
算法接收到RTK数据解析,然后可以给出以下新的RTK相关话题数据。
RTK融合后的轨迹是发布到
/baton/stereo3/fusion_odom里面的,此话题是融合了GNSS\RTK\relocalization的位姿作为输出,有哪些数据源输入就融合什么数据源,全都有就全都融合。
/baton/stereo3/fusion_odom #融合后的odometry,在SLAM局部坐标系下
/baton/stereo3/fusion_path #融合后的历史轨迹,在SLAM局部坐标系下
/baton/stereo3/rtk_path #RTK历史轨迹,在SLAM局部坐标系下
/baton/stereo3/lla_odom #融合后的odometry,XYZ是经纬高(单位:度、米),朝向是在东北天坐标系下
五.关于时间同步
现在RTK/GNSS有两种时间同步方式: 一是前面说到的在接入GNSS天线再使用RTK算法时设备已经通过设备板载的GNSS模块接入了PPS时间同步; 二是RTK驱动发布的NMEA-GGA报文以及NMEA-RMC报文在算法里解析卫星时间来同步系统时间
这两种时间同步方式都是同步的系统的时间,各个话题的时间都是基于同步后的时间作为时间戳。