视觉融合双天线RTK
注意:此功能需要V2510xx及之后的版本支持
双天线RTK顾名思义可以提供俩个天线定位信息,意味着除了能获得定位信息外,还可以获得朝向信息。
Viobot2算法默认为VIO模式,在没有接入双天线RTK数据时融合位姿输出的是VIO的位姿,有双天线RTK数据并且成功初始化之后融合位姿输出的就是视觉+RTK做融合的位姿,意味着融合位姿不仅会像RTK一样准确,而且即使在弱信号甚至无信号时融合位姿都可以持续输出。
viobot2使用RTK模块的大致步骤如下:
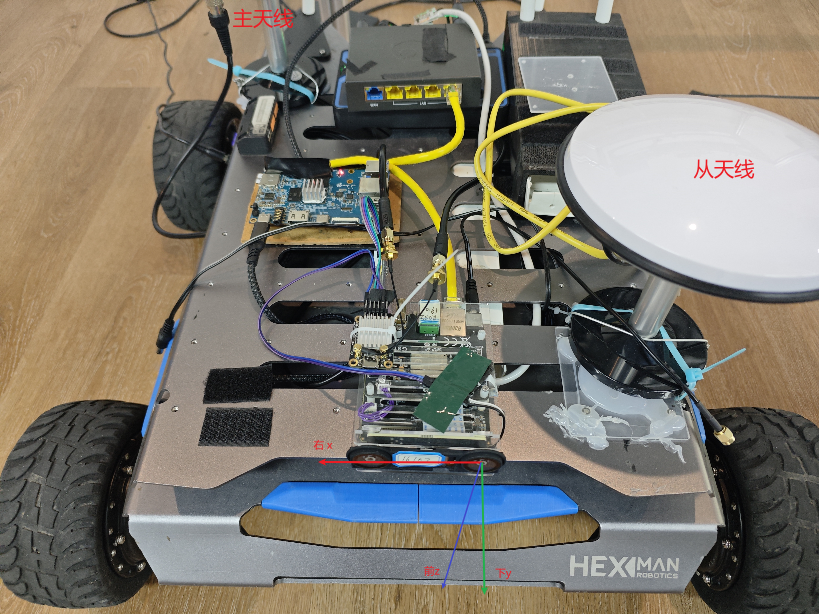
一.硬件准备
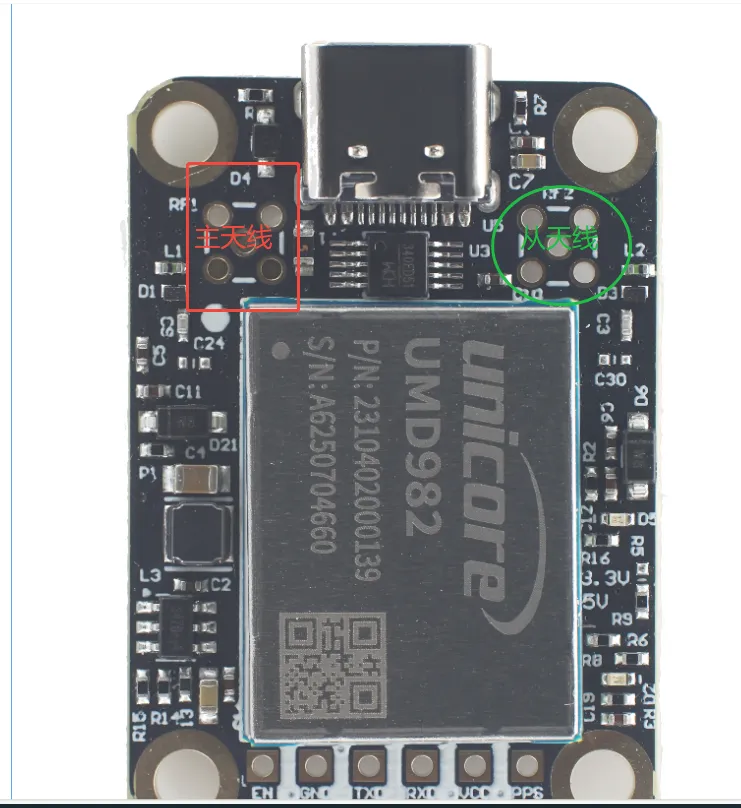
目前Viobot2适配的双天线RTK只有维特智能的UM982这一款,使用时需要开启$GGA 10hz $RMC 1hz #AGRICA 10hz的输出,通过以下的指令修改输出输出:
1. 配置串口波特率(这里是用com1输出)
Config com1 460800
2. 配置流动站工作模式
MODE ROVER
3. 串口上电默认无输出,配置GGA、RMC输出:
GPGGA COM1 0.1
GPRMC COM1 1
4. 配置定向固定解
GPTHS 1
AGRICA COM1 0.1
5. 使能pps
CONFIG PPS ENABLE GPS POSITIVE 500000 1000 0 0
6. 永久保存配置
SAVECONFIG
um982模块
所以数据流的简图基本等同单天线RTK版本,和单天线模块唯一不同的是话题消息中多了AGRICA报文:
![]()
二.模块驱动&外参标定
提前在Viobot-UI上勾选RTK,并选择双天线版本,执行重启,使用roslaunch hm_rtk hm_rtk.launch启动RTK驱动,然后确保查看到/rtk_nmea和/baton/rtk_sixdof消息输出;
这里使用的是HM_RTK的开源驱动仓库,硬件连接、使用方法等步骤与单天线的RTK使用方式相同,唯一有区别的是标定部分。
2.1 确定固定解
确保固定解:使用topic echo /baton/rtk_sixdof,按照以下注释的说明进行判断:
---
header:
stamp:
sec: 1757985729
nanosec: 401312000
frame_id: rtk
child_frame_id: ''
pose:
pose:
position:
x: -2345251.8804
y: 5394243.9843
z: 2458010.9024
orientation:
x: 0.05099666757356264
y: -0.00417499227936327
z: -0.9953600365410679
w: -0.08148807883870496
covariance:
- 0.00020449000000000002
- 4.0e-08 #位置固定解状态,非4则非固定解 这里用的是协方差非对角线上的元素的【状态 * e-8】来表示
- 4.0e-08 #定向固定解状态,非4则非固定解
- 0.0
- 3.4000000000000003e-07
- 0.0
- 0.0
- 0.00052441
2.2 标定RTK与左目外参
上面几步确认数据正常后,打开hm_rtk.launch,设置好Y轴初始设定值,以及标定的初始值
calib_rtk_slam.launch:
<launch>
<node name="rtk_slam_calibrator" pkg="hm_rtk" type="calib_rtk_slam_node" output="screen">
<param name="ex_rtk_slam_x" value="0.03"/> <!-- 坐标系: 以左目为原点, XYZ-右下上, 即T_camL<-RTK -->
<param name="ex_rtk_slam_y" value="-0.01"/> <!-- 必需项,高程方向退化,不参与优化 -->
<param name="ex_rtk_slam_z" value="-0.24"/>
<param name="ex_rtk_slam_yaw" value="30.0"/> <!-- 单位:deg,从SLAM坐标系到RTK坐标系的偏航角。逆时针正,顺时针负 -->
<param name="package_path" value="$(find hm_rtk)"/>
</node>
</launch>
重新开RTK驱动
roslaunch hm_rtk hm_rtk.launch
启动stereo3算法,并且开启RTK驱动里面的标定程序
roslaunch hm_rtk calib_rtk_slam.launch
确认stereo3正常启动,标定程序正常启动后,移动Viobot2和RTK天线的组合体,随机多方向快速运动,避免静止或直线运动,推荐绕8运动,算法会截取最新的10s数据进行标定。标定完成后,ctrl+C结束程序,标定的结果会输出在终端上。

三、RTK融合
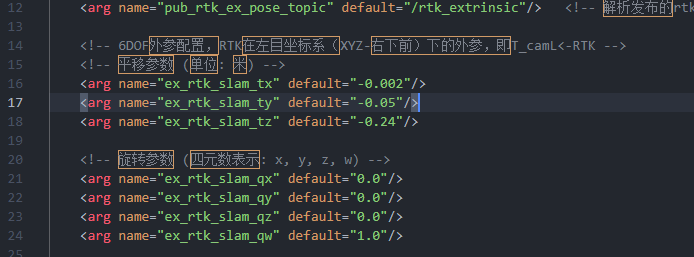
把标定结果重新写到HM_RTK.launch,ros2的修改"install/hm_rtk/share/hm_rtk/launch/hm_rtk_ros2.launch.py"对应的参数。
<arg name="ex_rtk_slam_x" default="-0.026357"/>
<arg name="ex_rtk_slam_y" default="-0.05"/>
<arg name="ex_rtk_slam_z" default="-0.283098"/>
然后重新把RTK驱动开起来,开启stereo3算法,运动过后等到RTK有固定解后,就会有RTK的融合结果了。
算法接收到RTK数据解析,然后可以给出以下新的RTK相关话题数据。
/baton/stereo3/fusion_odom #融合后的odometry,在SLAM局部坐标系下
/baton/stereo3/fusion_path #融合后的历史轨迹,在SLAM局部坐标系下
/baton/stereo3/rtk_path #RTK历史轨迹,在SLAM局部坐标系下
注意:目前判断RTK是否融合RTK的方式可以通过判断
/baton/stereo3/rtk_path是否发布以及/baton/stereo3/fusion_odom和/baton/stereo3/odometry的位姿是否一致;
四、关于时间同步
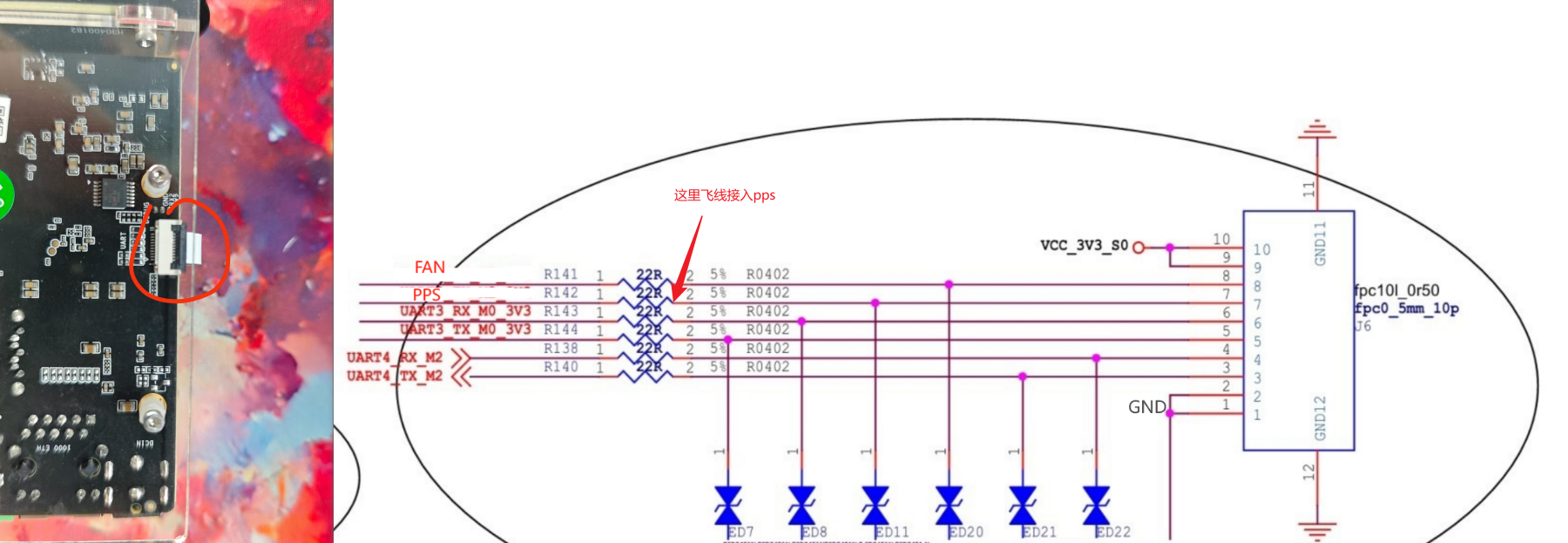
现在RTK/GNSS PPS时间同步方式: 一是前面说到的在接入GNSS天线再使用RTK算法时设备已经通过设备板载的GNSS模块接入了PPS时间同步; 二是改造Viobot2,需要重新焊出pps和GND线
这两种时间同步方式都是同步的系统的时间,各个话题的时间都是基于同步后的时间作为时间戳。
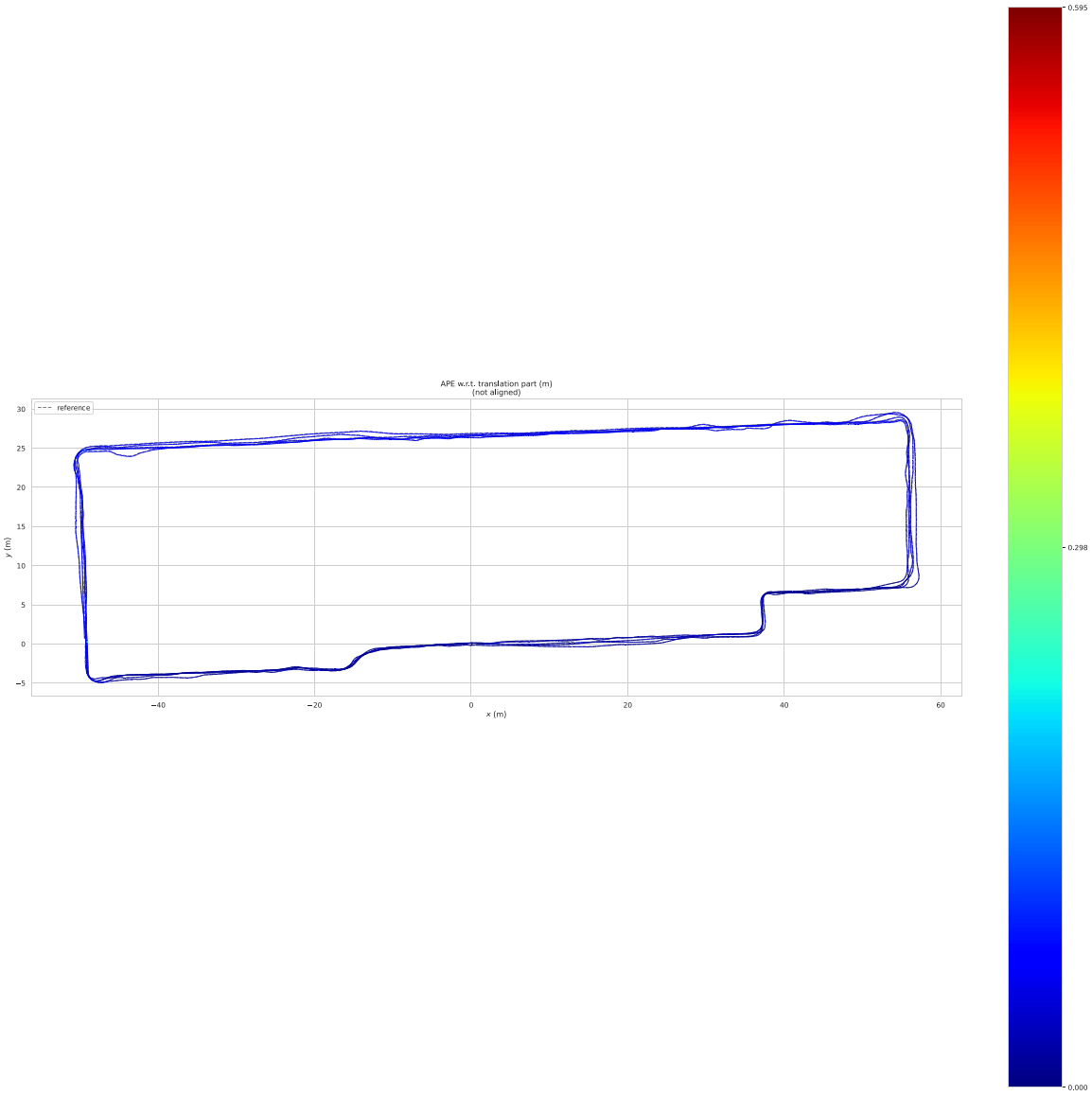
五、精度测试报告
| 路径长度 | 绝对轨迹误差RMSE |
|---|---|
| 1353.41米 | 0.0325 |