SDK Demo
简单说明一下SDK的http使用,给出一个基础的例程。
地址:Hessian-matrix/SDK_Demo (github.com)或SDK_Demo(gitee.com)
1.windows下使用
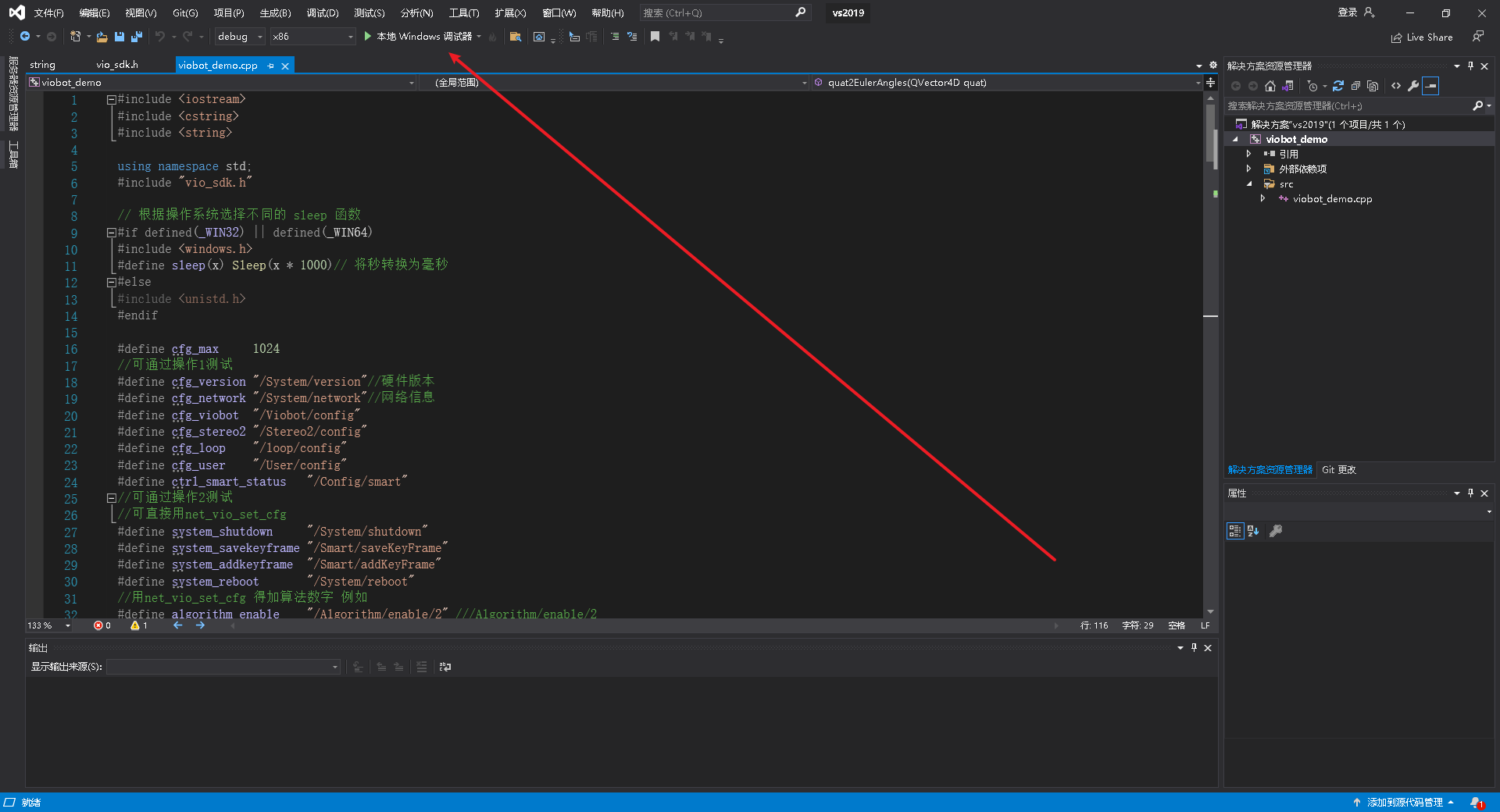
直接使用vs2019打开,直接本地调试器启动就行。
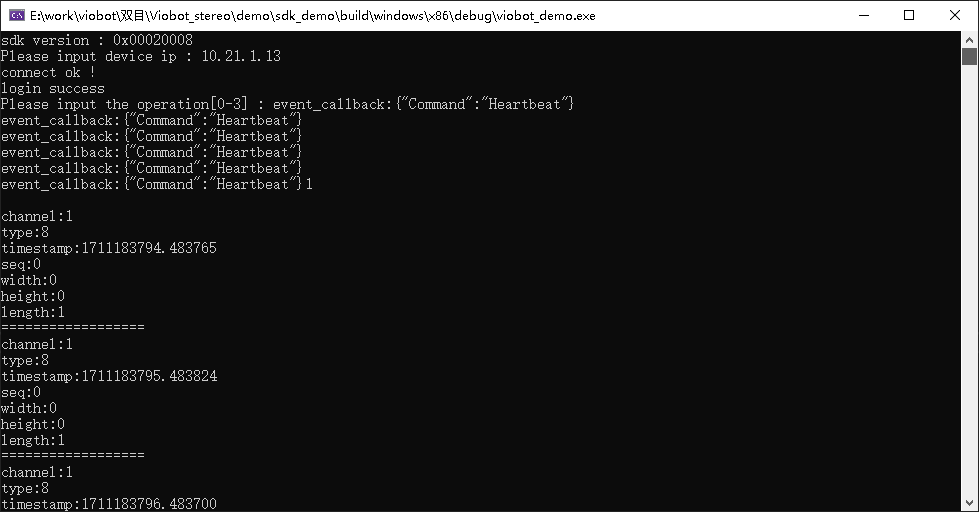
(1)输入设备IP按回车就能连接上。
会打印event_callback,表示设备心跳正常。

(2)输入1按回车,开启流通道1的接收。
通道1的数据就能就接收到了,默认会接收到类型8的数据,也就是当前的系统状态,该消息是1秒上传1次。
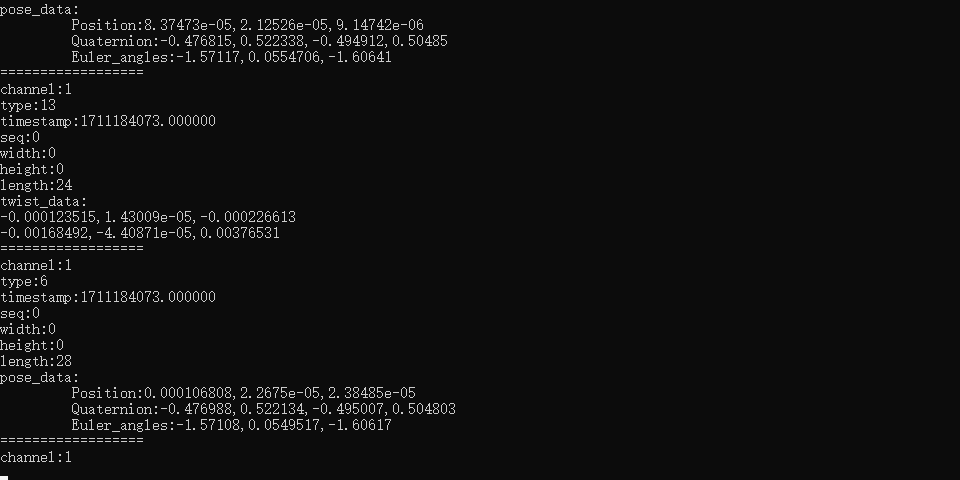
(3)输入2按回车,启动/停止stereo3算法
当系统状态是ready时,启动算法,终端会持续打印通道1的pose和twist数据;当系统状态是stereo3_running时,停止算法,不会再接收到pose和twist数据,也就没有了打印这两个数据。
(4)输入0按回车,退出登录并停止程序
2.linux下使用
(1)修改makefile里面的lib_path
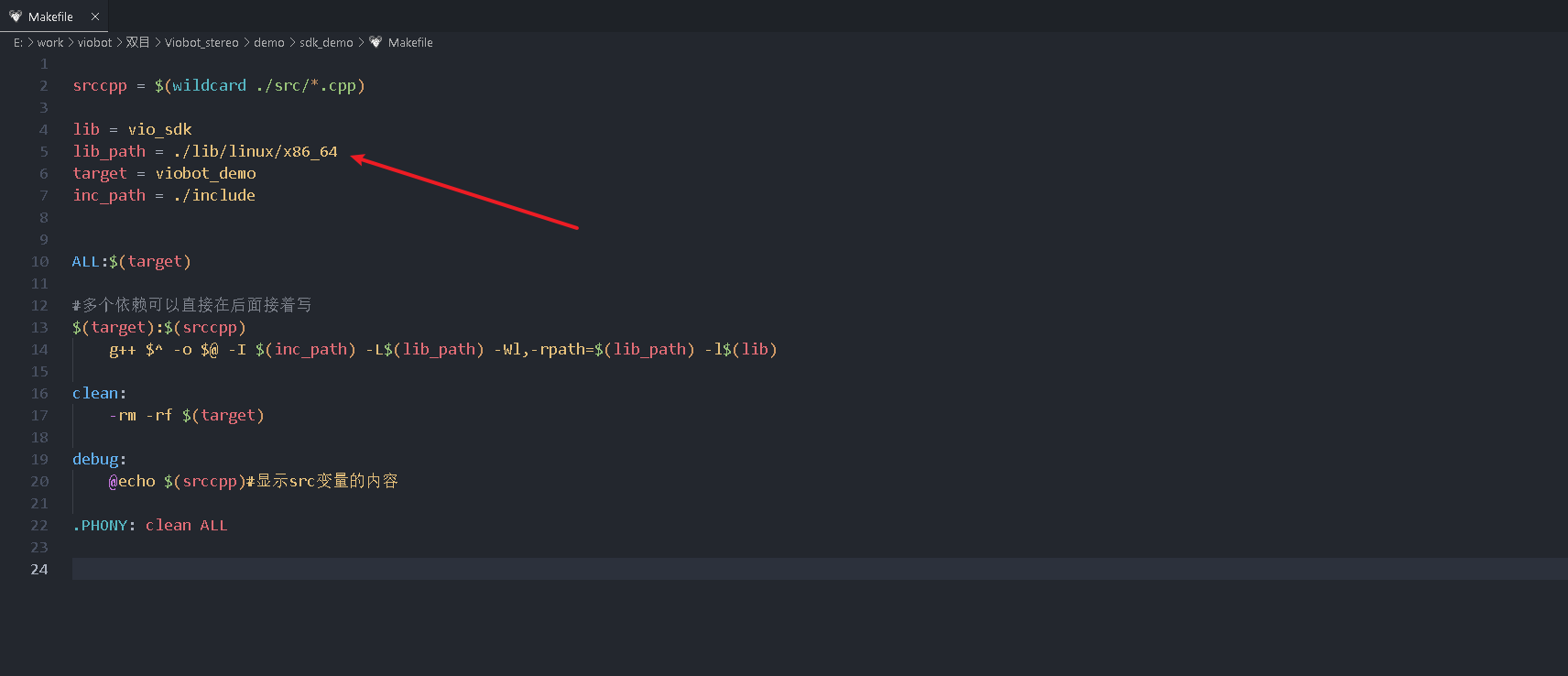
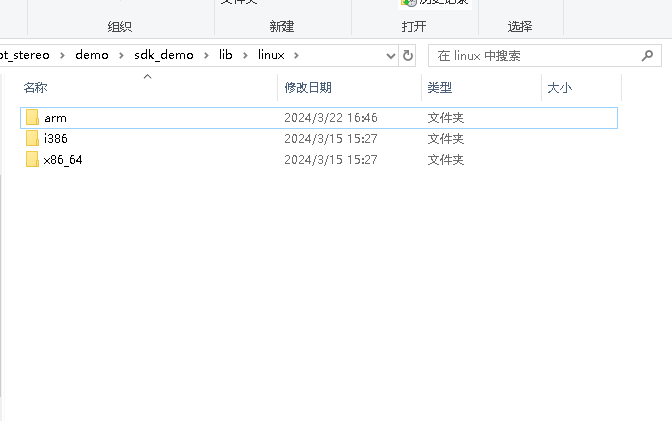
lib/linux路径下的对应的so路径对应不同的平台
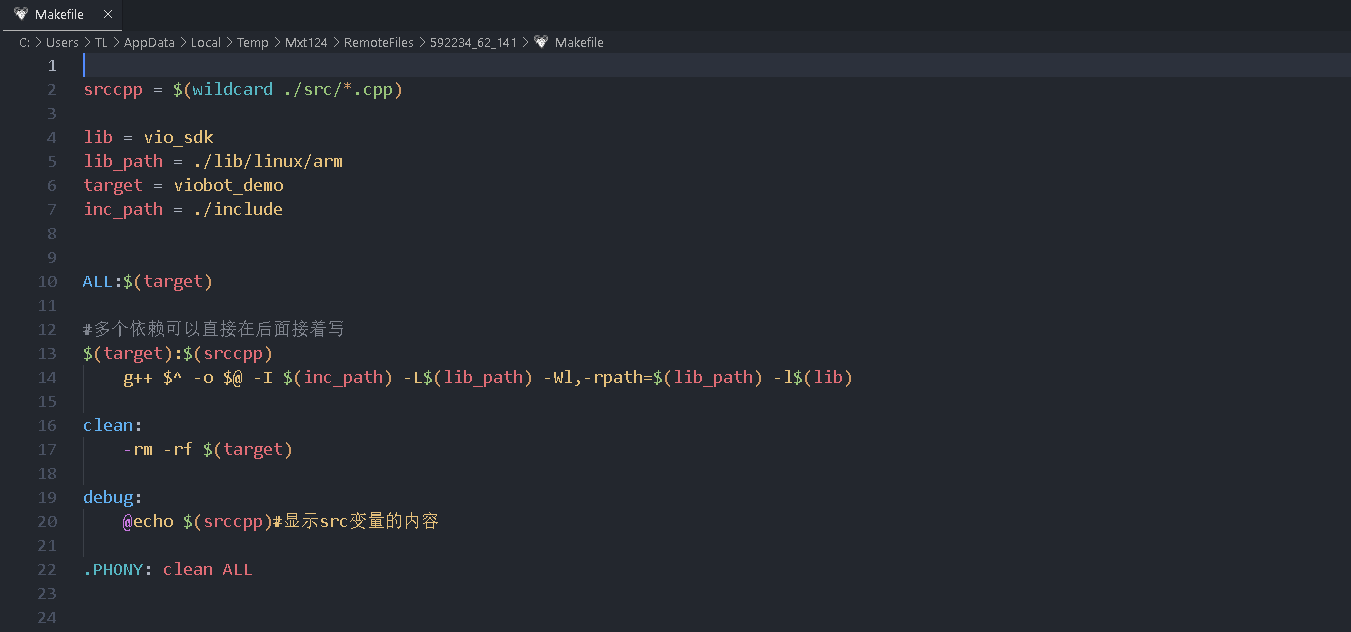
以viobot本机为例:
改为:lib_path = ./lib/linux/arm
(2)编译运行
cd sdk_demo
make
./viobot_demo
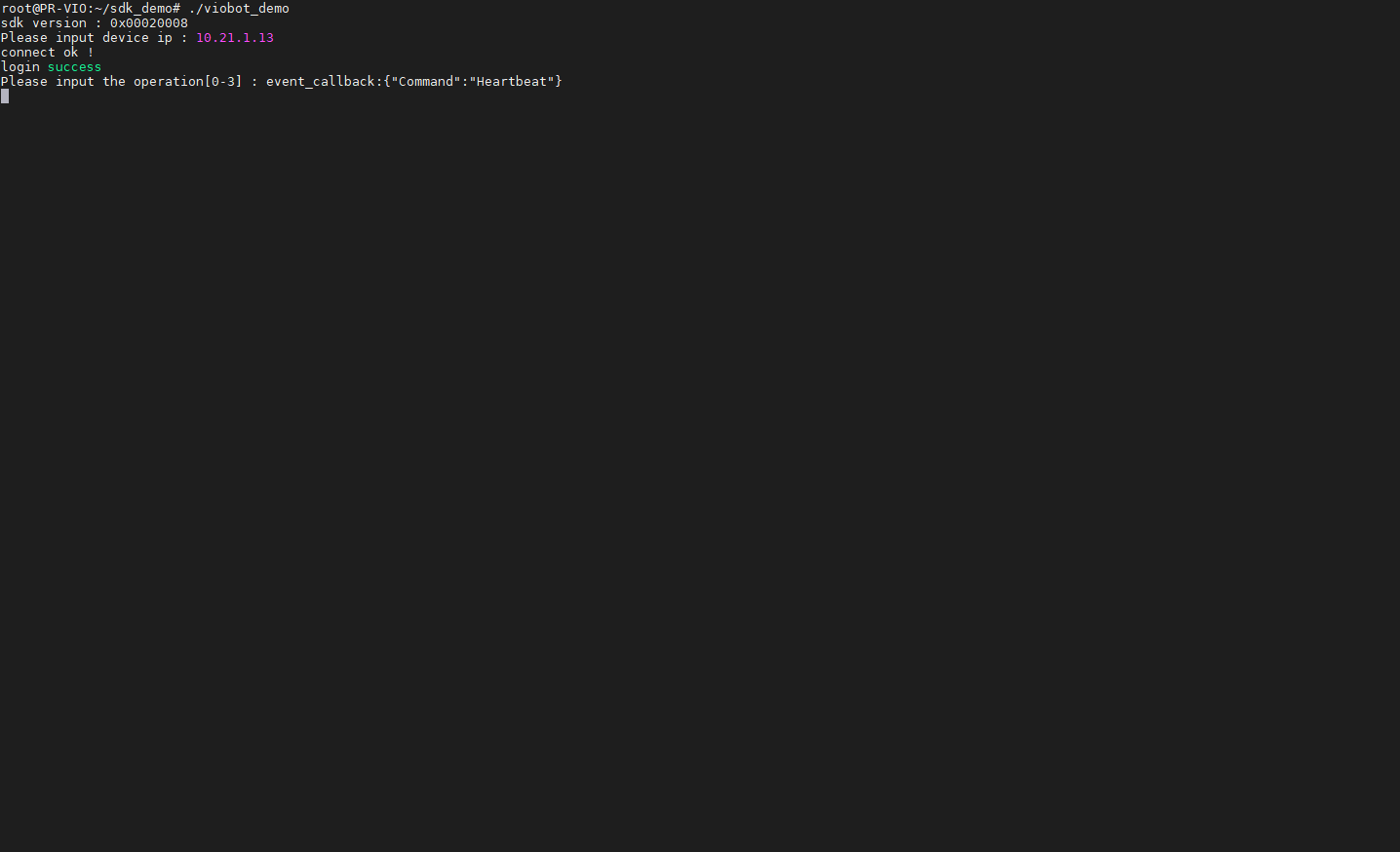
1.输入设备IP按回车就能连接上。
会打印event_callback,表示设备心跳正常。
2.输入1按回车,开启流通道1的接收。
通道1的数据就能就收到了,默认会接收到类型8的数据,也就是当前的系统状态,该消息是1秒上传1次。
3.输入2按回车,启动/停止stereo3算法
当系统状态是ready时,启动算法,终端会持续打印通道1的pose和twist数据;当系统状态是stereo3_running时,停止算法,不会再接收到pose和twist数据,也就没有了打印这两个数据。
4.输入0按回车,退出登录并停止程序
