基本功能
设备拿到手当然是要先试一下效果的,这部分可以参考<开机指南>
接下来我们就从UI开始熟悉这个产品吧!

一.设备连接与状态
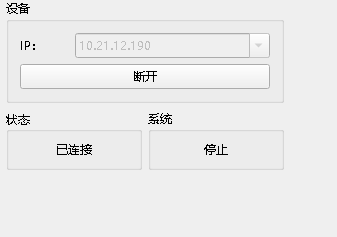
输入设备IP或者是通过自带的局域网设备搜索功能给到正确的IP之后,点击连接,连接成功后连接按键会变成断开键。同时状态框显示为已连接状态,无连接则会显示已断开。
系统框显示的是设备当前算法状态,
此时它的系统的算法状态是停止状态的,这个系统状态有三个状态:
1)停止
2)stereo3初始化中
3)stereo3运行中
二.操作栏
1.常规操作
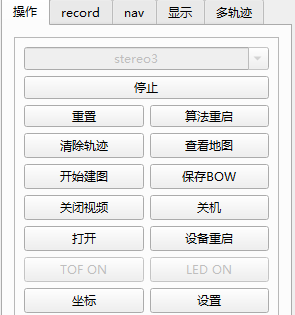
首先是操作页面,包含了stereo3算法的启动、停止、重启和重置(注:重置不会清掉已加载到内存的词袋地图)
清除轨迹:清除UI当前显示的轨迹和点云。
查看地图:查看保存的bow关键帧的位姿。
开始建图:保存bow后重建用于重定位的图。
保存BOW :将本次运行生成的词袋地图保存到指定路径。
关闭视频 :关闭UI视频流显示。
设备重启:点击按钮后,整个设备系统会直接重启,用于一些配置项修改生效。
坐标 :设备当前位姿显示。
设置:调出设置页面
2.record操作页
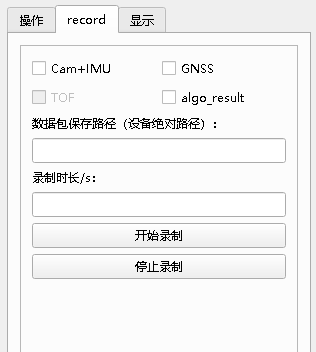
用于设备录制rosbag,Cam+IMU勾选会录制传感器的数据,算法开启后algo_result勾选会录制算法运行过程产生的结果。
数据包保存路径:需要填设备的绝对路径,如:/root/baton_bag/ 注:保证路径存在前后斜杠要有
录制时长:设置录包的时间长度,单位为s。须注意录制的数据包的大小,传感器数据30s大概是 280M左右。
~~3.显示设置页面~~

~~勾选点云是否显示,默认开,点云呈散射形。一般建议不开。~~
~~包含一些类型选择和显示范围的设置,暂时对于用户来说作用不大。~~
三.odom数据显示
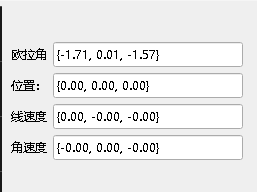
odom数据悬浮显示在右上角,显示的数据包括当前设备对于算法开启时第一个位姿(0,0,0,0,0,0,0)的欧拉角,位置差,以及设备当前的线速度和角速度。
四.视频流显示

显示当前双目图像,连续推流就成了视频流。
五.三维空间相机位姿
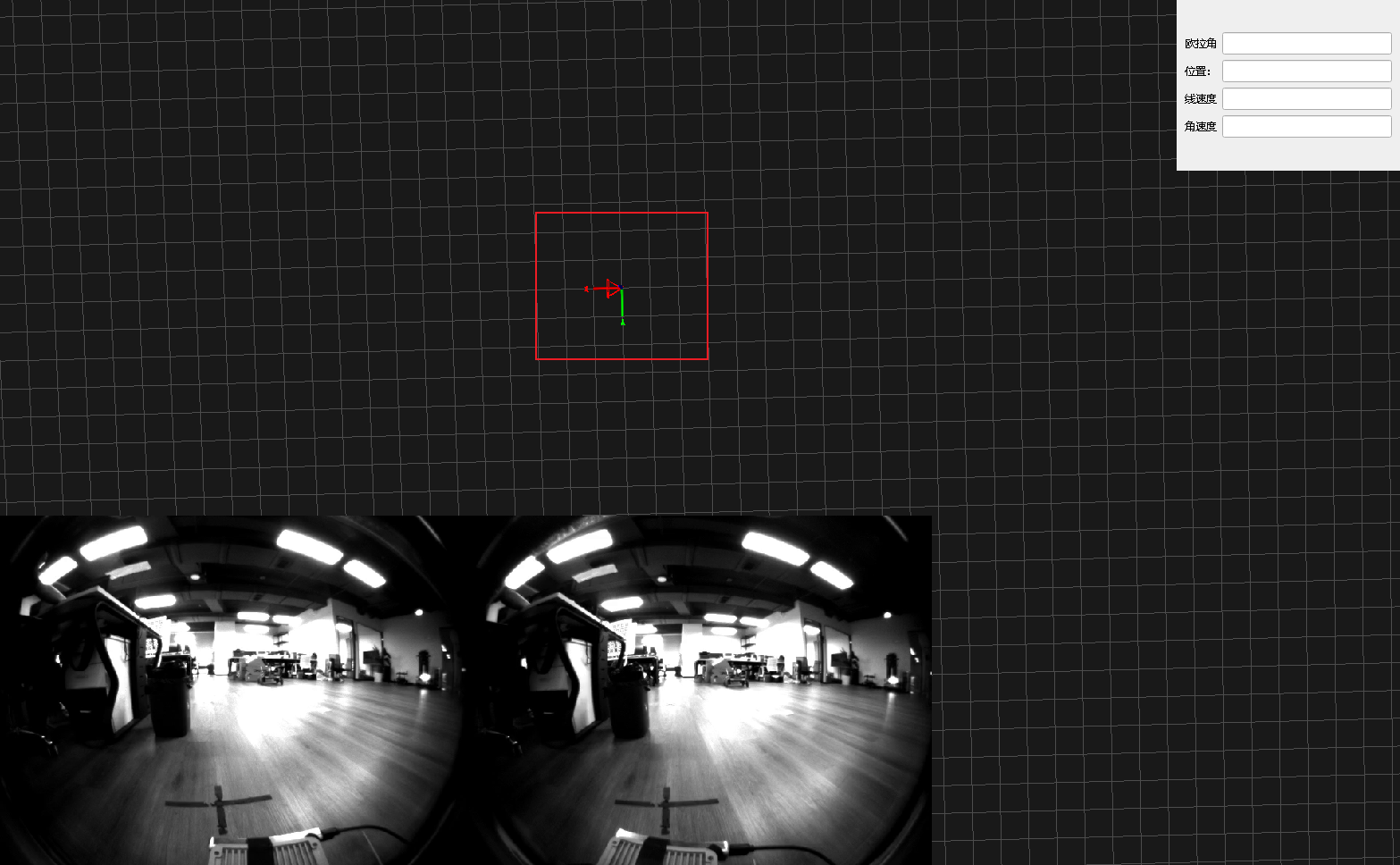
红色框的锥形框框就是当前相机在三维空间的位姿,这个界面是三维的,可以拖拽切换视角,使用鼠标滚轮放大和缩小。
六.设置页面
设置页面包含了以上几个选项卡。
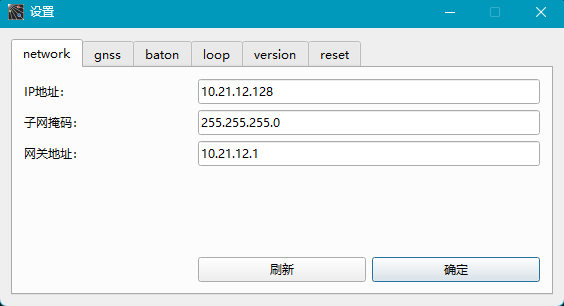
1.network
网络设置页面,点开设置页面,会自动获取当前设置的IP地址,需要修改IP则直接输入对应的IP、子网掩码和网关,点击确定即可。设置网络需要重启设备才能生效。
2.loop
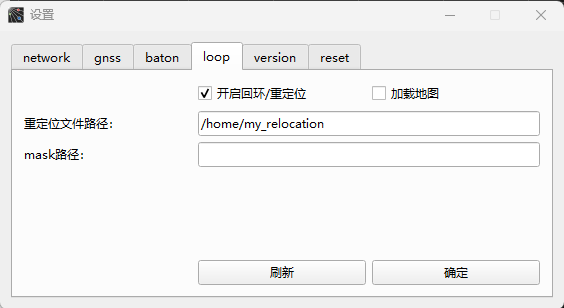
回环设置:
开启回环/重定位:在使用历史词袋地图时,勾选会自动加载下面路径下的词袋地图,并且算法运行时自动添加关键帧。(此功能也用于重定位的数据采集)
重定位文件路径:设置保存词袋地图的路径。注意:该路径是在设备上的。
3.baton

相机的基本设置
imu频率:默认200Hz,现最高支持400Hz,没有特殊需求一般不建议修改。
image频率:相机帧率,一般有几个常用帧率挡位可调。
自动曝光:前面的勾勾上则开启自动曝光,根据下面设置的常规亮度来调节相机成像亮度,如果不需 要自动曝光,则将勾去掉,单独设置下面的曝光时间。
深度图:HM_INSIDE应用,勾选后能用左右双目计算出视野中的深度信息,具体查看HM_INSIDE应用;
自动增益:前面的勾勾上则开启自动增益,该功能在场景特别暗的时候好用,但在一般场景下,开启 自动增益可能会影响算法精度。
曝光时间:曝光时间在去掉上面的自动曝光的勾时可设置,如果要用到这个设置,可能需要用户自行 根据不同设置值下的成像表现来设置,属于经验值。调大图片 会变亮,调小会变暗,取值 范围:1~65535。
增益等级:自动增益勾去掉时可设置,推荐值1,如果画面太暗,效果不佳可设置为2。
常规亮度:推荐室内:80~95;室外:120~135;根据画面亮度手动调节。
namespace: 设置当前相机的话题前缀,默认为baton。
DOMAIN_ID: 用于设置ROS2多机通信里面的domain_id,默认为-1,不启用。 (注:ROS版本是没有这个设置的)
4.version
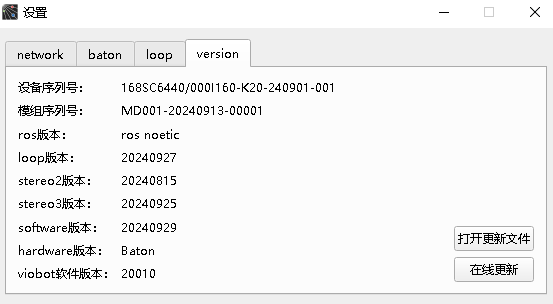
记录了当前设备的SN号以及软硬件版本。集成了更新功能。