数据包录制
录包暂时只支持录制ROS数据包。
需要注意的是,数据包可能会很大,设备自身的存储空间有限,如果需要录制很长时间的数据包的话建议外接高速内存卡。内存卡的写入速度至少在25M/S以上。数据包大小参考:图像帧率在25fps时,单录传感器数据60S大概是600M左右,如果需要录制点云数据会更大。
一.使用UI录制数据包
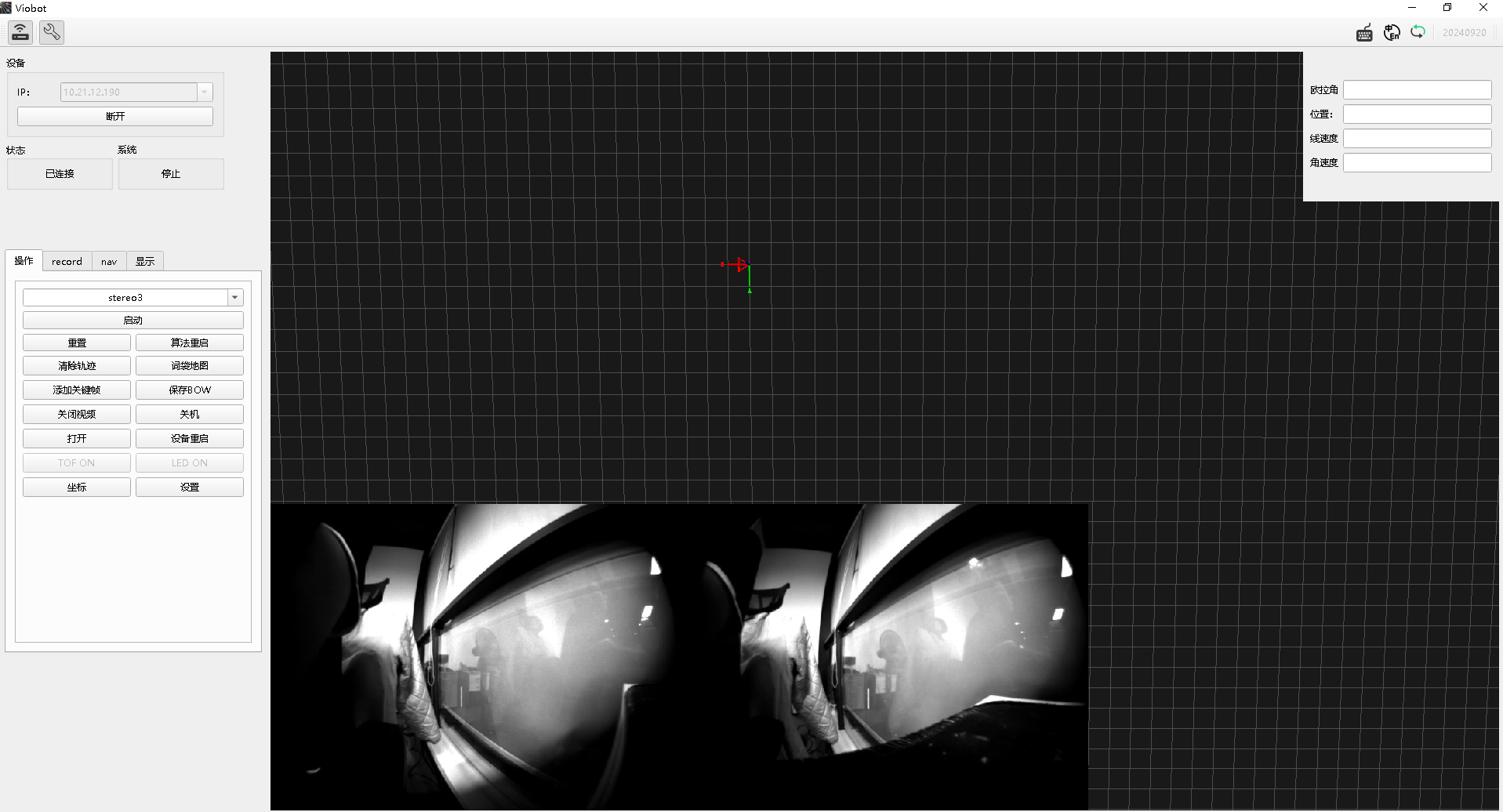
1.连接设备
IP框输入IP,点击连接,连接成功后会直接显示视频流。
2.录包
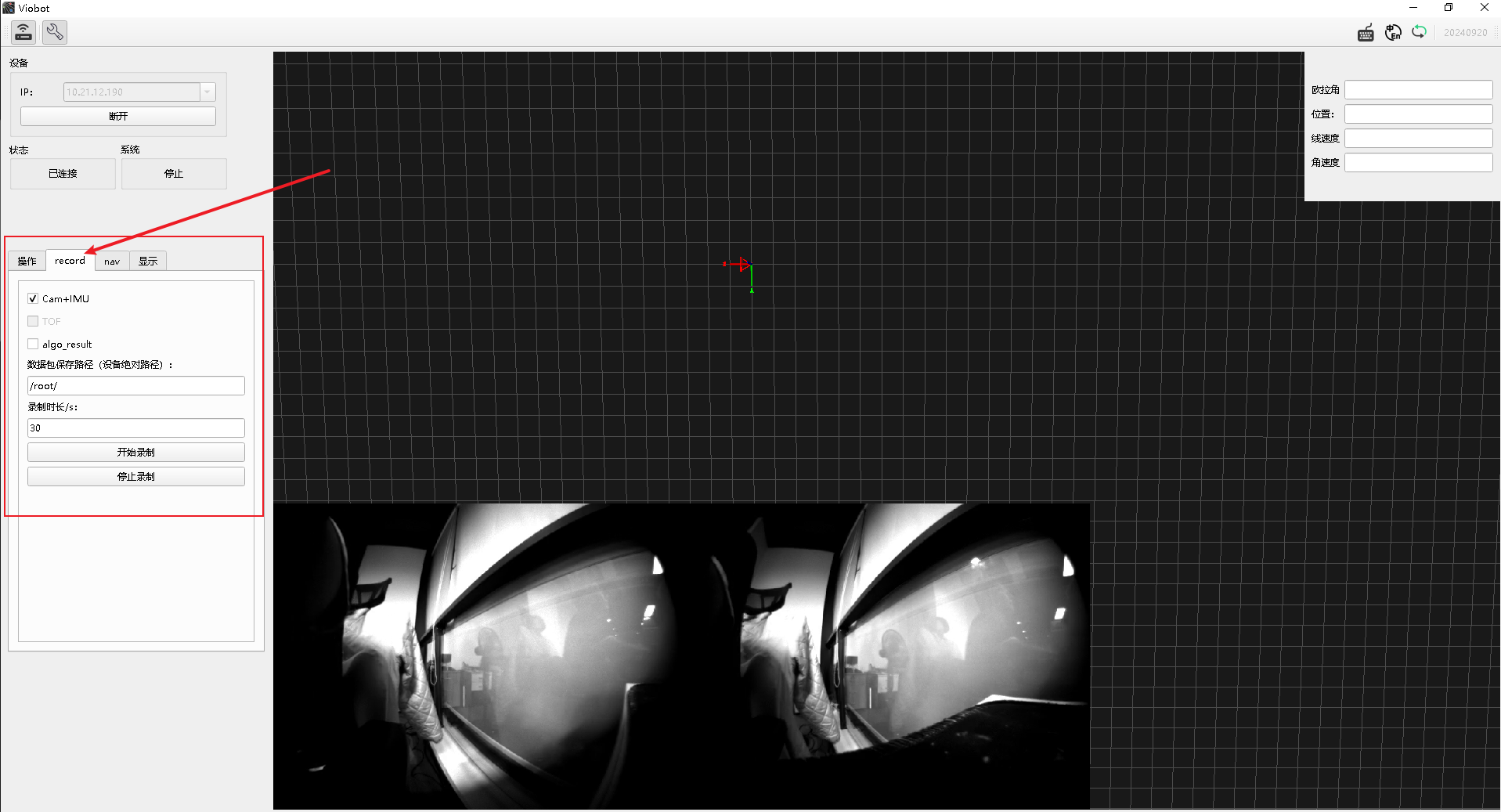
操作栏点击record。
I.勾选需要录制的数据:
(1)Cam+IMU
添加录制左右目相机raw数据、相机内外参、相机曝光参数以及imu原始数据。
(2)GNSS
添加录制GNSS原始数据。
(3)algo_result
添加录制算法运行过程的结果数据,包括每帧的odometry、feature_img 以及点云数据。
II.数据包保存路径
输入数据包保存的路径,该路径是在设备上的。
录制到设备本机上面的话可以直接在数据包保存路径的输入框内输入保存路径,如:/home/PRR/(这里前后斜杠一定要有)。但是需要注意一下当前设备的存储空间是否足够。
由于设备上面的emmc存储空间并不是很大,数据包是raw数据会占用很大的空间。我们更推荐使用高速TF卡,挂载到Baton,然后把路径指定到挂载的路径里面。挂载TF的具体操作请参考(硬件接口的使用下面的Baton的TF卡挂载)。
挂载TF卡后输入数据包保存的路径/mnt/tfcard/(这里前后斜杠一定要有)
系统默认会做字符串拼接,把输入的/mnt/tfcard/加上baton.bag作为包的名称,如果需要录制多个数据包,可在/mnt/tfcard/后添加另外的命名标识如:/mnt/tfcard/20241001_,它录制出来的数据包就会是/mnt/tfcard/20241001_baton.bag,以此类推。
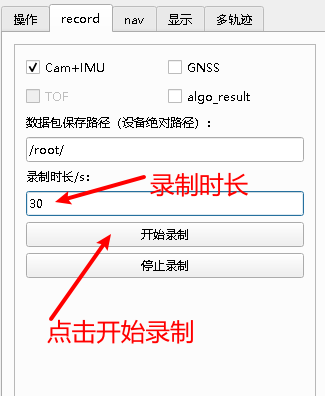
III.输入录制时长,点击开始录制
录制时长单位为秒。点击开始录制的按键,该按键会变成灰色的倒计时,表示录制剩余时间。点击停止录制可提前结束数据包的录制。
IIII.录制完成后查看数据包
ssh登录进入设备,用户:PRR 密码:PRR
cd /home/PRR/
rosbag info baton.bag
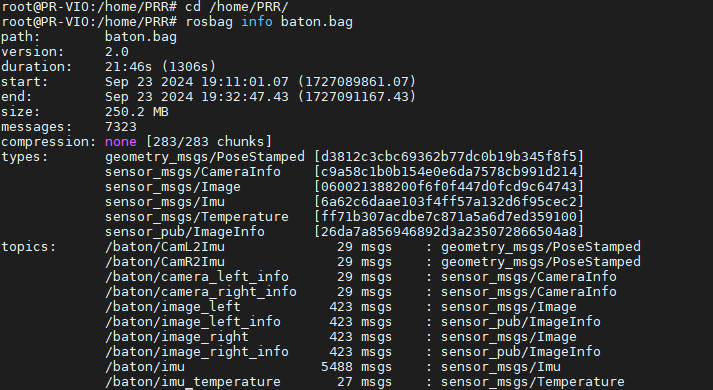
可以看到话题列表和对应得帧数以及数据包的大小。
二.手动录制数据包
1.用于记录运行过程和现象
这个我们只需要录制开启了stereo3算法后的输出就可以了。
主要需要的话题就是/baton/stereo3/feature_img和 /baton/stereo3/odometry,这两个话题分别是算法运行过程中提取了特征点并将双目图像合成后的图,可以看到算法在运行过程中的提点表现,其实也是对应上位机视频流输出的视频;另外一个话题是算法运行过程中设备相对于它初始位置的位姿变化,即设备运行过程的位姿,对应上位机上面的相机框的运动。
录包命令:
rosbag record /baton/stereo3/feature_img /baton/stereo3/odometry -o /home/PRR/run_record.bag
其中/home/PRR/run_record.bag是所存的数据包的路径+名字,如果不在前面加路径就会录在你当前终端所在的路径,-o会自动给你所取名字增加一个时间在前面,方便区分不同时候录的包。
2.录制运行过程的原始传感器数据
录制了原始的传感器数据,可以通过SDK的for_bag标志可以关掉设备原本的传感器数据读取,从而将数据包的数据作为算法的输入源来运行算法,可以用于算法的调参。
主要的话题包括/baton/image_left 、/baton/image_right 、/baton/camera_left_info 、/baton/camera_right_info、/baton/imu 、/baton/CamL2Imu、/baton/CamR2Imu
录包命令:
rosbag record /baton/image_left /baton/image_right /baton/camera_left_info /baton/camera_right_info /baton/imu /baton/CamL2Imu /baton/CamR2Imu -o /mnt/tfcard/raw_record.bag
其中/mnt/tfcard/raw_record.bag是所存的数据包的路径+名字,如果不在前面加路径就会录在你当前终端所在的路径,-o会自动给你所取名字增加一个时间在前面,方便区分不同时候录的包。